




Product Introduction
Description
USBCAN-I pro adapter is a analysis tool for CAN bus which can build connection between PC and CAN network. It can make CAN data visibility with ECANtools software and realize CAN data transmit/receive and other functions. If user want to develop application program, GCAN provides the application demo code, including VC, VB,.net, Delphi, Labview and C++Builder and other development routine.
Specifications
|
Physical
|
||
|
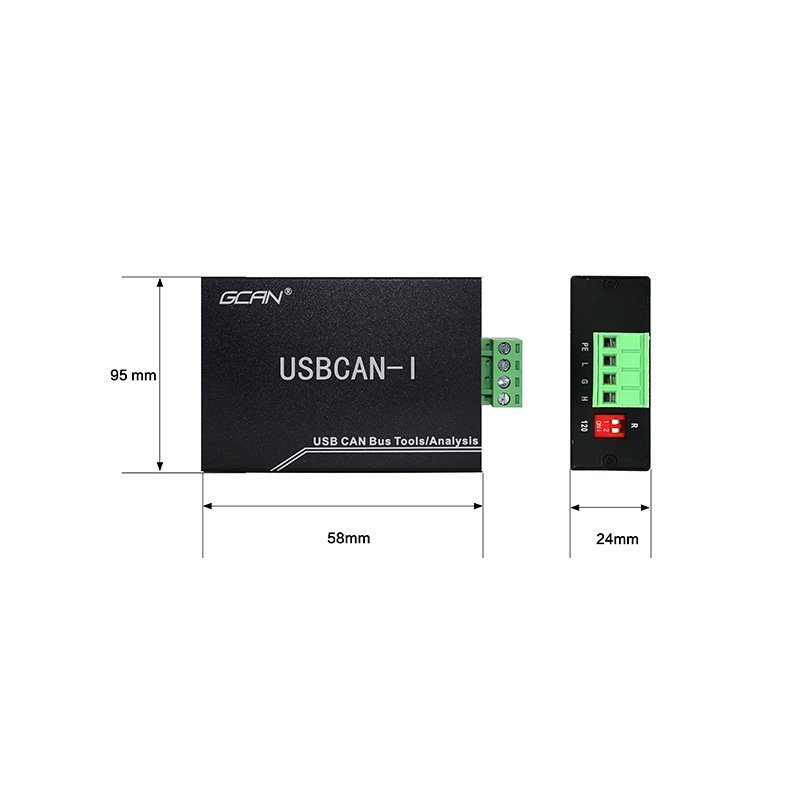
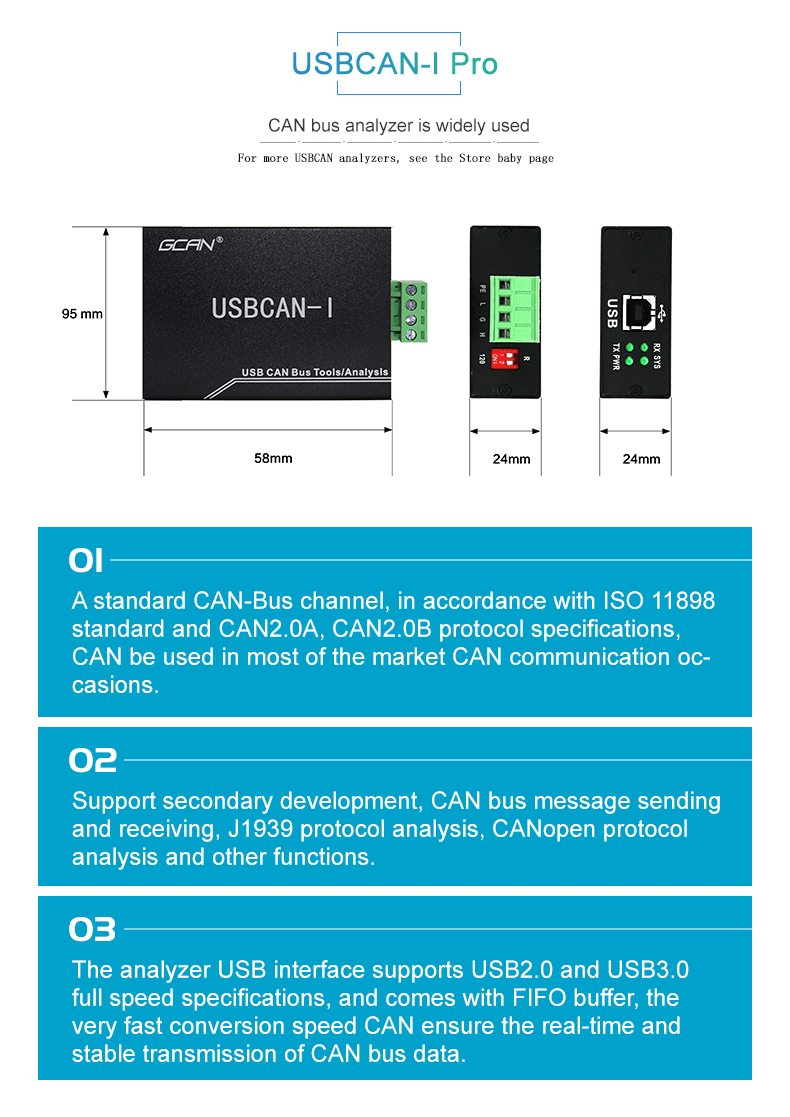
Size (LxWxH)
|
95 x 58 x 24 mm
|
|
|
Weight
|
approx.90g
|
|
|
Operating temperature
|
-40°C~85°C
|
|
|
Humidity
|
15 to 95% non-condensing
|
|
|
Connectivity
|
||
|
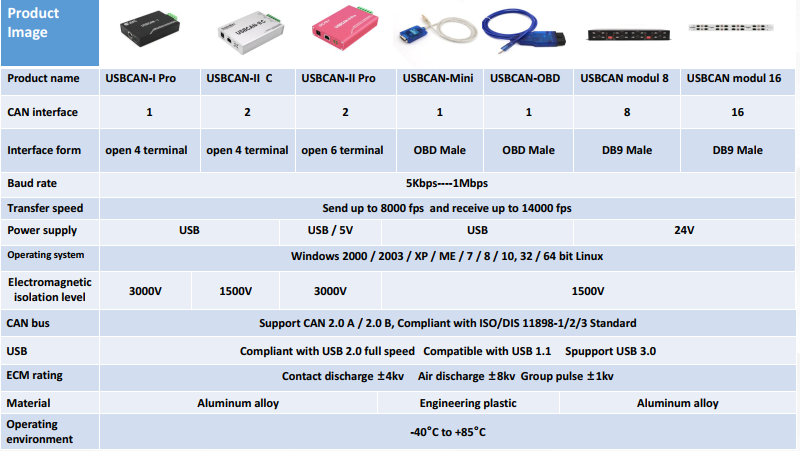
CAN channel
|
1
|
|
|
CAN connector
|
Open 4-pin terminal block
|
|
|
CAN interface
|
Compliant with CAN 2.0A, CAN 2.0, conform to ISO11898-2
|
|
|
CAN baud rate
|
5kbit/s to 1Mbit/s
|
|
|
USB interface
|
USB 2.0, compatible with USB 1.1 and USB 3.0
|
|
|
Isolation
|
DC 3000V electrical isolation
|
|
|
Receive maxinum
|
14000 fps
|
|
|
Transmit maxinum
|
8000fps
|
|
|
CAN resistor
|
120Ω,select by Dip switch
|
|
|
Power supply
|
||
|
Power Supply
|
USB powered
|
|
|
Current
|
Max 130mA
|
|
|
Software
|
||
|
Software support
|
ECAN Tools
|
|
|
Operation system
|
Windows XP/7/8/10,etc and 32/64-bit Linux
|
|
|
Development environment
|
VC、VB、.Net、Delphi、Labview,C++Builder
|
|
Functions
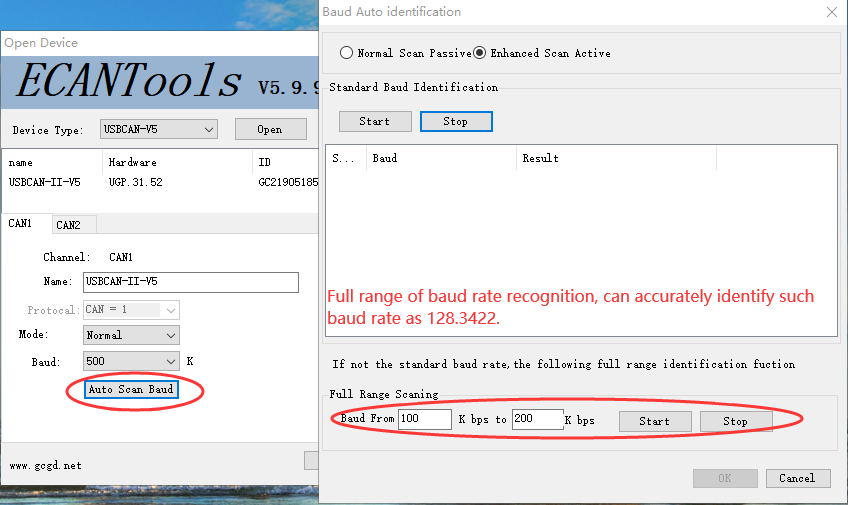
1.Automatic baud rate recognition function
It can automatically identify the baud rate of a bus with an unknown baud rate. As long as it is an active CAN bus, our company’s equipment can identify its baud rate. There are two ways to identify the baud rate:
A: Standard baud rate recognition.(1000K, 500K, 250K…)
B: Full range of baud rate recognition.(set the start and end range, scan the baud rate in the range)
This function can send and receive data after identifying devices with unknown baud rate, and can also be used to test the baud rate of newly developed CAN communication devices.


Language switching function: the software supports both Chinese and English
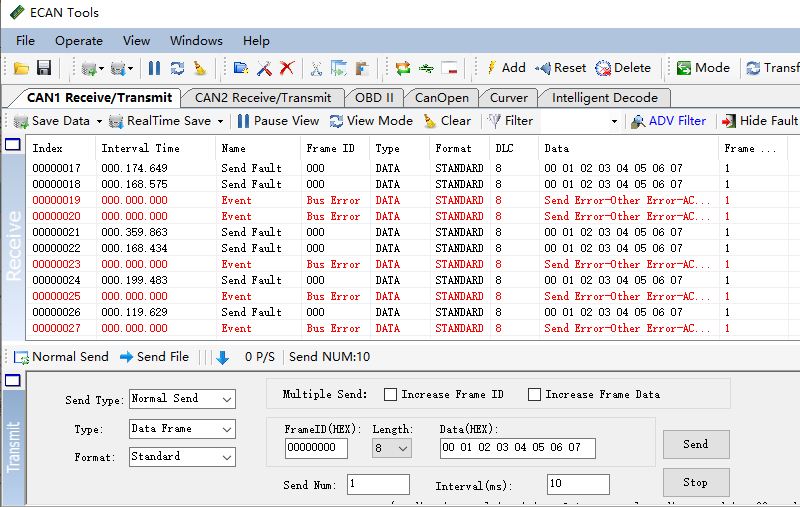
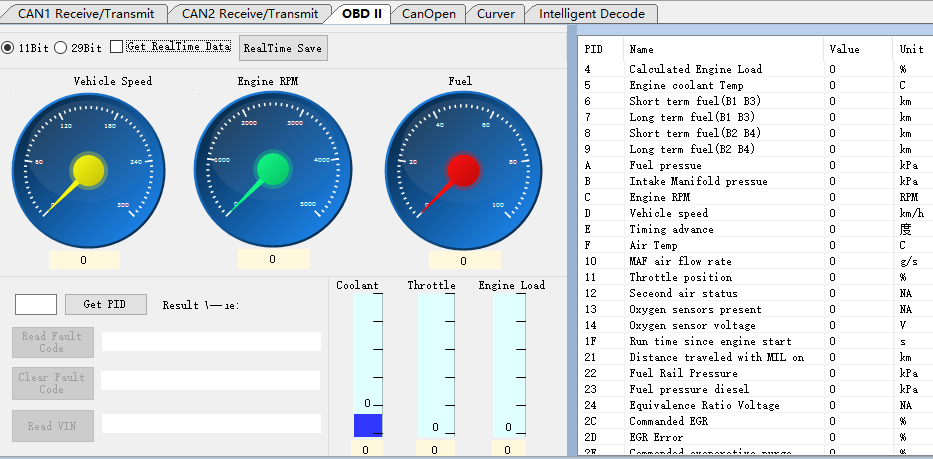
Physical quantity extraction and graphic display function: After the software loads the DBC file, it can display the data changes in real time through graphs, curves, etc. The user can analyze the data by observing the curve or graph. The software can also support the loading of custom protocols, and graphs and curves can be drawn after loading user-defined protocols.
Secondary development
Features
- Adapter for USB connection (USB 1.1, compatible with USB 2.0);
- USB voltage supply;
- Bit rates up to 1 Mbit/s Time stamp resolution 1μs;
- Compliant with CAN specifications 2.0A (11-Bit ID) and 2.0B (29-Bit ID);
- CAN-Bus connection via OPEH4, PHOENIX;
- NXP SJA1000 CAN controller;
- NXP PCA82C251 CAN transceiver;
- Support ECAN Tools software;
- Galvanic isolation on the CAN connection up to 1500 V;
- Extended operating temperature range from -40 to 85 °C;
- Device driver and software support Windows 2000/2003/XP/7/8/10 and Linux;
- Size: (L)95mm * (W)57mm * (H)24mm.
Our Service
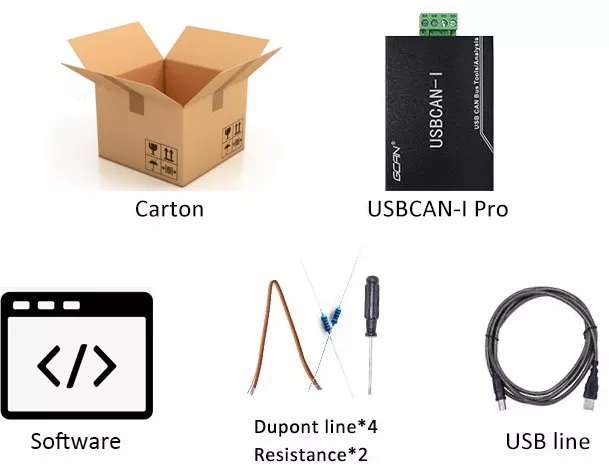
Packing
Delivery Time
2~5 days after receipt of your payment.
After-sales
24-hour telephone after-sales service
Technical support
GCAN provide one year free after-sales warranty, lifetime free software and technical support.
User Manual(Click to view)
USBCAN-I Pro adapter