4. ECANTools software
ECANTools software is a professional debugging analysis software for Windows platform development.
4.1 Start software
1. If user has installed the ECANTools software,can double-click “ECANTools”to open.
After select corresponding equipment type,click”open equipment”to appear CAN
Equipment.

2. After select corresponding equipment type,click”open equipment”to appear CAN
Equipment.
3 optional modes:
normal mode: conform to receive/transmit data of software;
listen mode:conform to monitor the Bus that don’t be disturbed,not to transmit data;
loopback mode:can test if CAN communication of USBCAN equipment is normal;
4. Select baud rate:User need to set it by practical Bus baud rate.
Note:Please contact us if you need customize the baud rate.When user don’t know the baud
rate,also can identify the baud rate automatically.
4.2. receive/transmit data
Receiving/transmitting data is the main function of ECANTools.User can see the
receiving/transmitting data message directly.
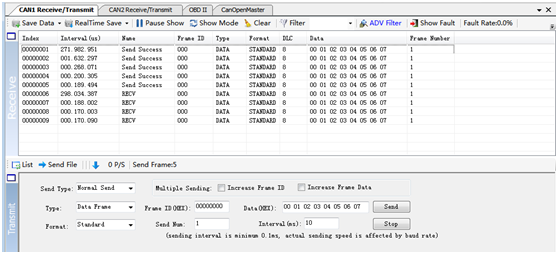
Expect these basic function,the software has a function sending document.
Ordinary sending:Sending document to node of Bus,can develop CAN-Bus programming to
download software.
Batch file sending:The batch file reserved resend to CAN-Bus in the order reserving and
Data.
4.3 CAN-Bus diagnosis function
CAN-Bus diagnosis function can detect the bus error frames and bus arbitration lost.

CAN bus status display: Indicate the CAN bus status include: bus normal, passive error, active error、bus off.
CAN controller FIFO overflow: The messages are too dense to data loss within a period time.
CAN controller error alarm: when many of errors happened on the bus, error counter exceeds
the alarm threshold, and display the error count.
CAN controller negative error: when many of transmitting or receiving errors happened, lead to
the CAN controller into the negative state, and display the error
count.
CAN controller arbitration lost:when this node failed to compete the CAN-Bus with other
equipment,the armed message would try to send next time,and
catch the corresponding error information to display.
CAN controller error: when CAN-Bus send or receive errors, error counter value will be accumulate, and can catch the wrong information, such as ACK, CRC error and so on.
CAN data buffer overflow:without exchanged data to compute during a time,lead to storage message number exceed firmware capacity limitation,and new received message cover the earliest message.
4.4 Relay function and offline function
CANBus-II Pro relay function can transmit the same or different CAN bus data to each other, and the data flow can be seen through the computer.
Configurate offline mode, the user CAN use notepad (. TXT) the instructions, download it in the CAN device, after downloaded CAN power can work offline mode according to the instructions in the notepad, offline instructions: send, time delay and trigger the sending, receiving modified send commonly used functions.
4.5 Other functions
Save data/live save
pause display
display mode
clear data
filter Settings
advanced mask
display error town
OBDII plugin
CANopen main station
Attention: User can find more functions in the ECANTools.
5.Secondary development
Offer standard interface function library: ECANVCI.h、ECANVCI.lib、ECANVCI.dll.