Descripción
El adaptador USBCAN-Mini es una herramienta de depuración o análisis con un canal CAN-Bus.
Este adaptador está diseñado para uso portátil. Usando este adaptador, el PC puede conectarse fácilmente a la red CAN-Bus a través de la interfaz USB, y convertirse en un nodo inteligente de CAN-Bus para transmitir / recibir datos CAN-Bus.
El adaptador viene con aislamiento y puede utilizarse en diferentes sistemas Windows/Linux.
Existen controladores de dispositivos, software e interfaces de programación (VC, VB, Net, Delphi, Labview, C++Builder) para diferentes sistemas operativos, por lo que los programas pueden acceder fácilmente a un bus CAN conectado.
| Físico |
|
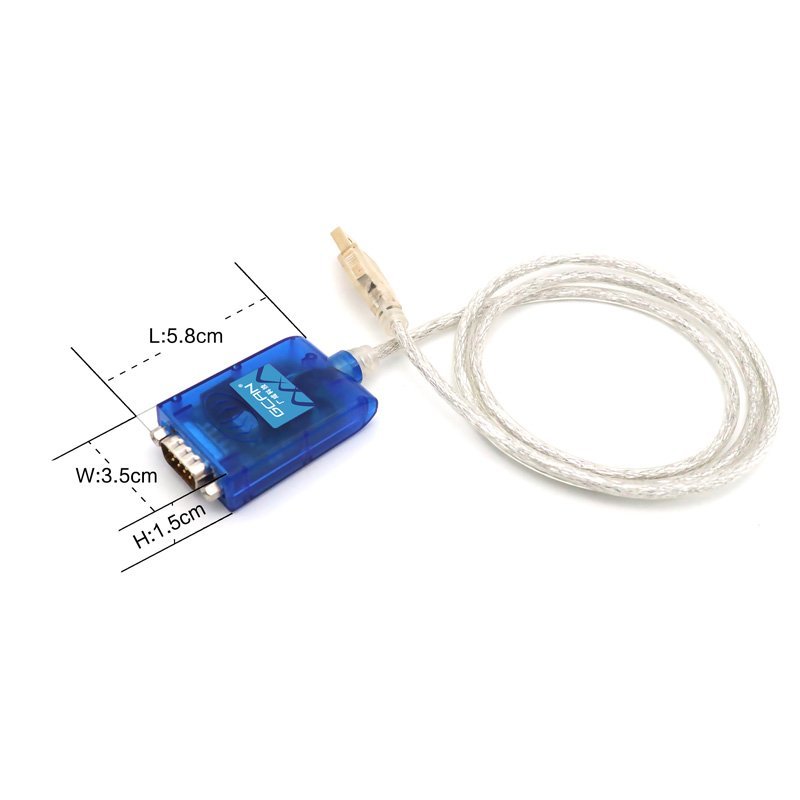
| Tamaño (LxAxA) |
55*35*14 |
|
| Alambre |
0.9m |
|
| Formulario de interfaz |
-40°C~85°C |
|
| El material de la carcasa |
Plásticos técnicos |
|
| Número de canal CAN |
solo |
|
| Eléctrico |
|
| Tensión de alimentación |
Alimentación USB |
|
| Tensión de trabajo |
5V |
|
| Tensión de aislamiento |
Aislamiento magnético de 1500 V |
|
| Sistema |
|
| Sistema de apoyo |
Windows 2000/2003 XP /7/8/10/ Por ejemplo |
|
| entorno de desarrollo |
VC VB C C+ C++ C++Builder NET Labwindows Delphi LabVIEW |
|
| Características del bus CAN |
|
| Velocidad en baudios |
5Kbps--1Mbps |
|
| Velocidad de transferencia |
Envía hasta 8000 tramas/s y recibe hasta 14000 tramas/s |
|
| Norma de ejecución |
Compatible con CAN 2.0A CAN2.0B ISO/DIS 1188-1/2/3 |
|
| Características del bus USB |
|
| Norma de ejecución |
Compatible con USB2.0 a toda velocidad Compatible con USB1.1 Spupport USB3.0 |
|
Funciones
1.Función de reconocimiento automático de la velocidad de transmisión
Puede identificar automáticamente la velocidad en baudios de un bus con una velocidad en baudios desconocida. Siempre que se trate de un bus CAN activo, el equipo de nuestra empresa puede identificar su velocidad en baudios. Hay dos formas de identificar la velocidad en baudios:
A: Reconocimiento de la velocidad de transmisión estándar.(1000K, 500K, 250K...)
B: Rango completo de reconocimiento de velocidad en baudios (establece el rango de inicio y fin, escanea la velocidad en baudios en el rango).
Esta función puede enviar y recibir datos después de identificar los dispositivos con velocidad de transmisión desconocida, y también se puede utilizar para probar la velocidad de transmisión de los dispositivos de comunicación CAN de nuevo desarrollo.

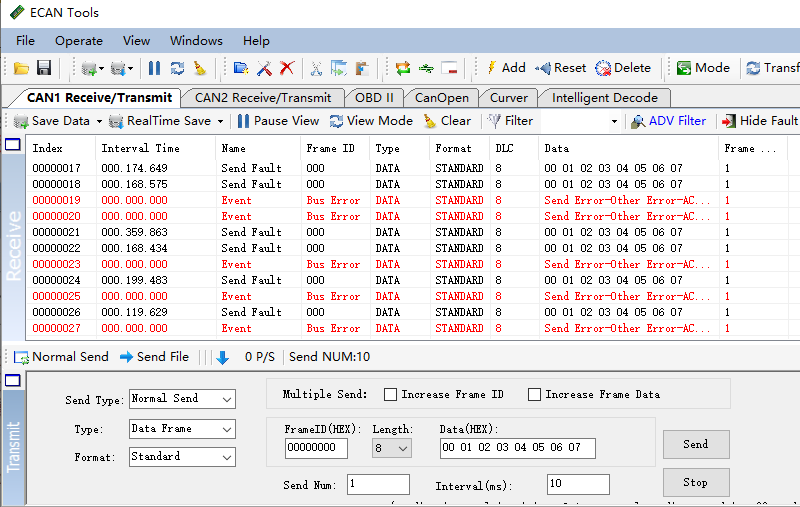
2.Función básica del transceptor de datos CAN
El software puede enviar y recibir datos estándar de bus CAN, soporta el envío y recepción de formatos de trama CAN2.0A, CAN2.0B, soporta el envío y recepción de tramas de datos, tramas remotas. La lista de recepción de software puede recibir hasta 1 millón de marcos de datos, y la lista de recepción se puede guardar localmente en 3 formatos-archivo de texto (.TXT), archivo por lotes (.CAN), archivo de Excel (.csv), esta función es conveniente El usuario realiza el almacenamiento de datos y análisis de procesamiento, y el archivo por lotes puede ser enviado de vuelta al bus CAN a través de software.
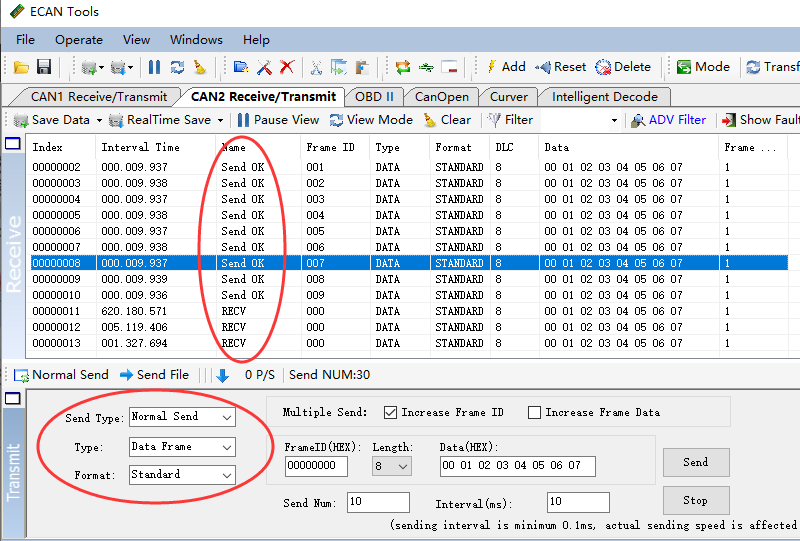
3.Función avanzada de transmisión de datos por bus CAN
Al enviar datos, puede establecer el modo de envío normal y el modo de envío de lista. El modo de lista puede editar múltiples datos CAN. Los datos CAN de la lista de envío se pueden enviar simultánea y cíclicamente, y la lista de envío se puede guardar/cargar.
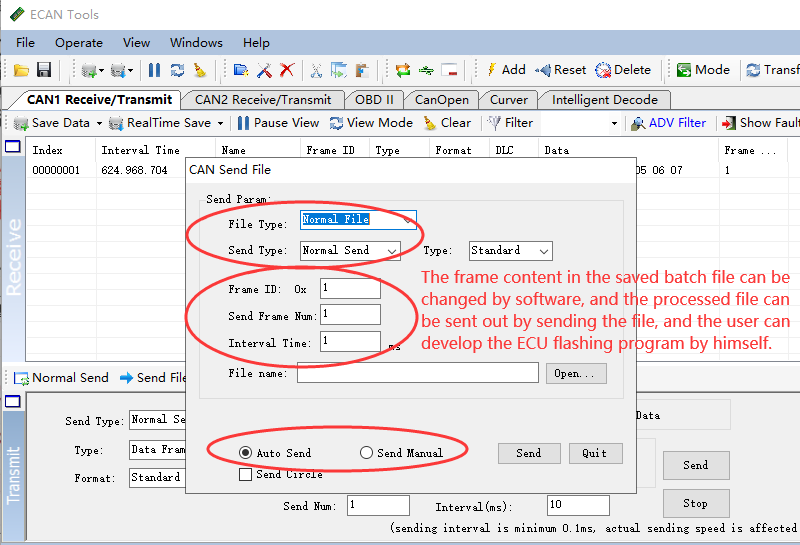
La función de envío de archivos puede enviar el archivo por lotes (.CAN) de vuelta al bus CAN de acuerdo con la información de la secuencia de tiempo al recibir. El archivo por lotes se puede editar a través del bloc de notas, y el archivo editado se puede enviar de acuerdo con el contenido realmente escrito por el usuario.
Esta función se puede utilizar como un simulador de señal para los usuarios de la electrónica del automóvil. Por ejemplo, la navegación del coche es controlada por la señal CAN para encenderse. El usuario puede interceptar un fragmento de datos que contenga la señal de inicio de la navegación del coche sin tener que encontrar la señal de inicio a partir de estos datos. Después de quitar la navegación del coche, reenviar esta pieza de datos a la navegación para iniciar la navegación sin ECU.
4.Recibir estadísticas en tiempo real
La función de estadísticas de recepción puede contar los datos recibidos según las reglas correspondientes en tiempo real. Las reglas estadísticas incluyen: nombre de trama, ID de trama, formato de trama, tipo de trama y datos de trama. Una vez establecidas las reglas de clasificación, cuando los datos recibidos cumplan las reglas de clasificación , el software fusionará automáticamente los datos que cumplan las reglas y contará la cantidad fusionada. Esta función es muy útil cuando la cantidad de datos en el bus es grande. Después de combinar la misma trama, es conveniente observar y analizar otros datos.
Hay muchos nodos en el bus CAN del automóvil que envían periódicamente los mismos datos al bus para comunicarse con la ECU. Y estos mismos datos suelen deslumbrar a los analistas de datos y causar interferencias en el análisis de otros datos útiles del bus. El uso flexible de la función de recepción de estadísticas puede combinar los datos enviados repetidamente en un bucle. En este momento, si hay nuevos en el bus Los datos se envían, se puede ver de forma intuitiva.

5.Función de filtrado multisegmento de datos
El software puede establecer el filtro de recepción, y usted puede especificar la visualización de datos que comienzan con determinadas ID de trama estableciendo la lista de filtros de recepción. Al configurar el rango de filtro de ID de trama, se alcanzan los datos de ID de trama en el rango de visualización, y se blindan los datos fuera del rango. Se pueden añadir múltiples rangos de ID de trama a la lista de filtros, y se pueden establecer tramas estándar y tramas extendidas. Esta función es muy conveniente para filtrar datos no deseados y facilitar el análisis de datos.
Esta función se utiliza para filtrar el ID de trama que no se desea ver. Si el usuario sólo está interesado en los datos enviados por un determinado ID de trama, los datos pueden mostrarse de forma intuitiva configurando el método de filtrado.

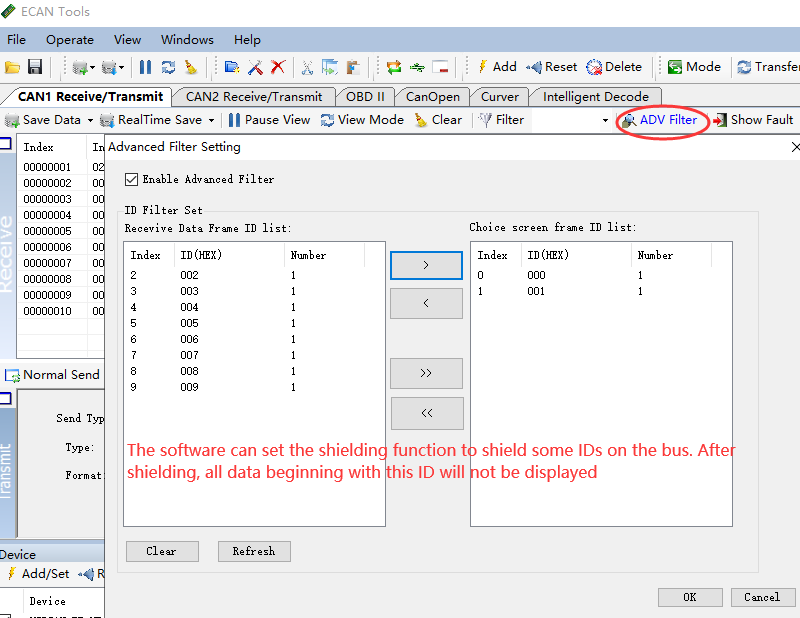
6.Función de blindaje inteligente de datos
El software puede configurarse para recibir apantallamiento, y los datos del ID especificado no pueden visualizarse seleccionando el ID de trama que debe apantallarse. Después de que el software reciba los datos, entre en la interfaz de configuración de máscara para mostrar el ID de trama de los datos recibidos actualmente. Al añadir la lista de máscaras, los datos que comiencen con el ID de trama especificado se enmascararán, y el ID de trama ya no se mostrará en el futuro Todos los datos. Esta función es conveniente para proteger los datos que no desea ver, y para el análisis de datos.
Esta función es muy adecuada para sistemas con gran tráfico de datos, como el bus CAN de los automóviles. La conferencia sobre el volumen de datos deslumbra a los analistas, pero en realidad no les importan muchos datos. El uso flexible de la función de blindaje puede reducir en gran medida la carga de trabajo de los analistas. Los usuarios pueden blindar los datos que no les importan al observar los datos, lo que resulta conveniente para el posterior procesamiento de los datos.
7.Función de recepción de tramas de error
El software puede recibir tramas de error en el bus. Cuando se genera una trama de error en el bus, provocará interferencias en el bus y, en casos graves, el bus se paralizará por completo. El software ECAN Tools puede recibir el tipo y el estado de la trama de error para que el usuario pueda encontrar a tiempo el nodo defectuoso en la comunicación del bus y repararlo o sustituirlo a tiempo.
La función esclava puede averiguar el dispositivo que envía la trama de error para su reparación o sustitución desconectando todos los nodos del bus por turno.
8.Función de reenvío de datos (Sólo se puede utilizar USBCAN-II Pro)
La función de reenvío de datos puede enviar los datos CAN recibidos por un determinado canal de vuelta al bus actual o a través de otro canal. La función de reenvío admite el filtrado de datos. Los usuarios pueden utilizar la función de filtrado junto con la función de reenvío de forma muy flexible. Como pasarela que conecta dos buses CAN, sólo reenvía los datos deseados.
Aplicación típica:
R: El aprendizaje del bus CAN y los desarrolladores de dispositivos pueden utilizar esta función para reenviar los datos enviados por el propio dispositivo a través de USBCAN para recibirlos, con el fin de juzgar si las funciones de envío y recepción del dispositivo son normales y si los datos son correctos.
B: Los usuarios de desarrollo y diagnóstico de electrónica del automóvil pueden utilizar esta función para filtrar los datos deseados y enviarlos a través de otro canal, que puede utilizarse para apantallar algunos datos irrelevantes.

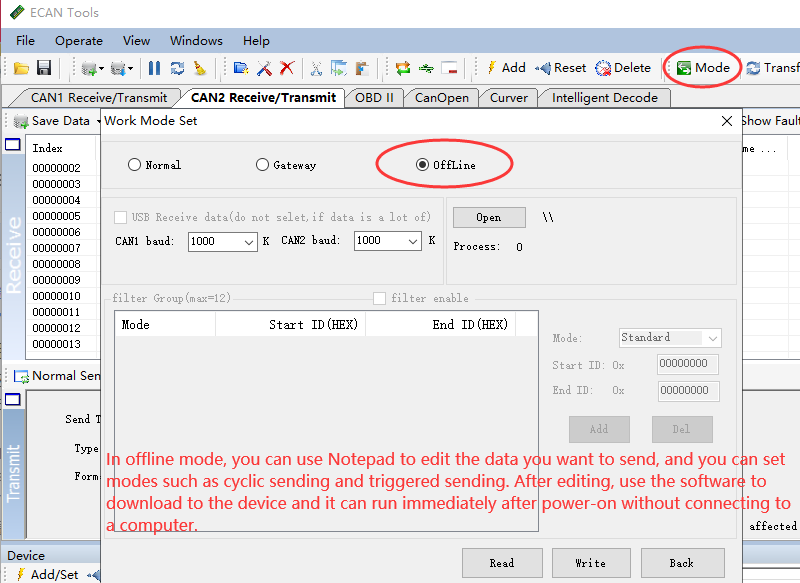
9.Función de uso sin conexión (Sólo se puede utilizar USBCAN-II Pro)
En el modo offline inteligente, los usuarios pueden editar las instrucciones con el Bloc de notas (.txt) y descargarlas en el dispositivo CAN. Después de encender el dispositivo CAN descargado, puede funcionar sin conexión según las instrucciones del Bloc de notas. Las instrucciones offline están disponibles. : Funciones comunes como enviar, retrasar, activar el envío, recibir y enviar después de la modificación, los usuarios pueden realizar fácilmente el control automático offline incluso si no desarrollan software dos veces. Los datos se pueden enviar automáticamente después del encendido. Esta función se puede utilizar para la prueba de la línea de producción, la simulación de datos de protocolo después de romper el protocolo, etc. Tiene una amplia gama de usos.
Aplicación típica:
R: Los datos enviados por can1 o can2 pueden definirse arbitrariamente.
B: Puede editar el comando del bus CAN para enviar datos. Esta función no requiere un desarrollador profesional. Usted sólo tiene que utilizar una herramienta simple bloc de notas para editar una pieza de la lógica para enviar datos para el desarrollo secundario.
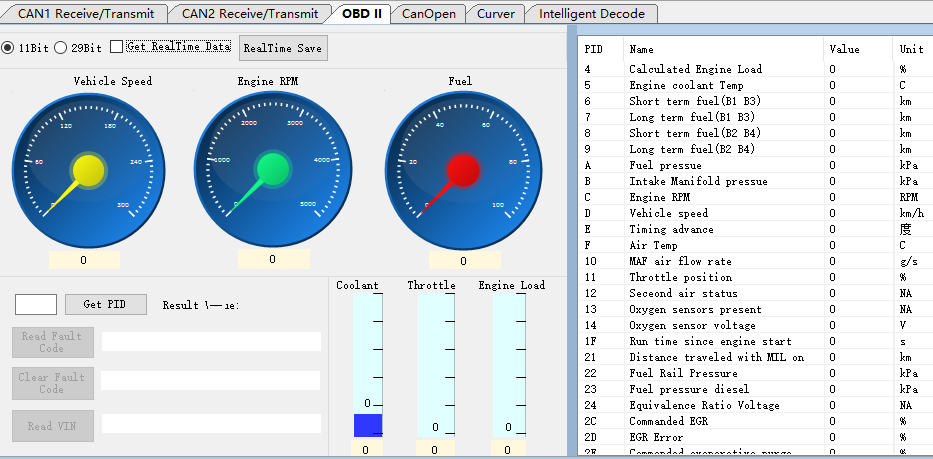
Decodificación del protocolo estándar 10.Automotive (USBCAN-II C no compatible)
Esta función puede utilizarse para analizar los datos del protocolo estándar ISO15765 de los vehículos de gasolina. Los usuarios sólo tienen que conectar el dispositivo USBCAN al bus CAN del coche (los modelos con pasarela tienen que pasar por alto la pasarela) para obtener una cierta cantidad de datos estándar y analizarlos, incluyendo: Velocidad del vehículo, velocidad de rotación, temperatura del agua, voltaje, cantidad de combustible, posición del pedal del acelerador, apertura del acelerador, etc. La cantidad de datos que se pueden analizar depende de si la fábrica de automóviles está totalmente desarrollada.
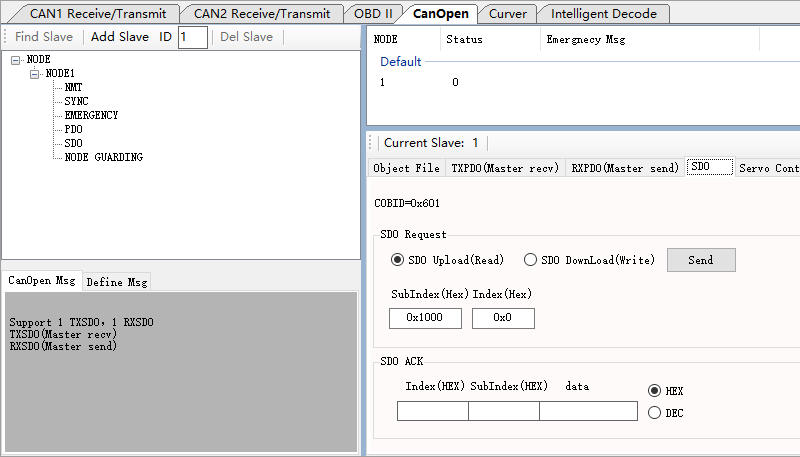
11.CANopen maestro (USBCAN-II C no compatible)
Esta función puede convertir el analizador USBCAN en un dispositivo maestro CANopen estándar y conectarlo a la red CANopen. El dispositivo maestro CANopen puede realizar operaciones de instrucciones básicas como NMT, PDO y SDO en los dispositivos esclavos del sistema, como CANopen. Los usuarios pueden utilizar el analizador USBCAN para depurar y analizar dispositivos esclavos CANopen como servomotores, codificadores, PLCs, sensores, etc. equipos.
Función de software de prueba CAN
Función de análisis de archivos DBC: se puede utilizar para el análisis del protocolo BMS de la pila de carga, el análisis del protocolo CAN J1939 del vehículo, la prueba y el mantenimiento del vehículo, el craqueo de datos del vehículo, etc.
Función de estadísticas de flujo de bus: el software puede contar el flujo de datos de bus en tiempo real y mostrarlo mediante dibujo.
Función de envío de datos de secuencia temporal: los datos de la lista se pueden enviar según la secuencia, y la lista de envío puede editar 100 elementos. Esta función es conveniente para depurar el protocolo que necesita enviar los datos según la secuencia.
Función de guardado de archivos: los datos de la lista de recepción se pueden guardar localmente y admite los formatos de archivo de texto (.txt) y Excel (.csv).
Función de cambio de idioma: el software admite chino e inglés
Introducción a las funciones del software de análisis del protocolo CAN Pro
Análisis de datos de protocolo de capa superior CAN: Puede analizar protocolos de capa superior de bus CAN estándar, incluyendo: DeviceNet, SAE J1939, CANOpen, ICAN, etc.
Análisis de protocolos personalizados: Los usuarios pueden utilizar guiones para definir sus propios protocolos. Una vez programado el protocolo personalizado en el software de acuerdo con las reglas, cuando los datos recibidos se ajusten al protocolo, el software los analizará automáticamente según la edición del usuario.
Función de activación: El usuario puede preestablecer la condición de activación y los datos o archivos que se van a enviar. Una vez activado el ajuste de disparo, la función de disparo se activará cuando se reciban datos que cumplan las condiciones. La función de activación puede pausar la visualización, enviar datos y enviar archivos. Esta función puede utilizarse para el posicionamiento y la detección de mensajes especiales.
Reproducción de datos, función de reproducción offline: Esta función puede cargar el archivo por lotes (.CAN) guardado por el software CAN Pro en la lista de envío, y los datos del archivo se pueden reenviar al bus CAN de acuerdo con la secuencia de tiempo al guardar.
Función de extracción de magnitudes físicas y visualización gráfica: Después de que el software cargue el archivo DBC, puede mostrar los cambios de datos en tiempo real mediante gráficos, curvas, etc. El usuario puede analizar los datos observando la curva o el gráfico. El software también puede soportar la carga de protocolos personalizados, y se pueden dibujar gráficos y curvas después de cargar protocolos definidos por el usuario.
Desarrollo secundario
Todos los tipos de productos GCAN USBCAN admiten el desarrollo secundario. Proporcionamos bibliotecas de enlace dinámico y estático de desarrollo secundario, así como rutinas de desarrollo y códigos fuente de rutina. Las funciones de la biblioteca son sencillas y cómodas de utilizar. Los usuarios pueden aplicar rápidamente nuestros dispositivos USBCAN a En su propio proyecto, si encuentra problemas en el desarrollo secundario, le proporcionaremos un soporte técnico perfecto; si el usuario no tiene la capacidad de desarrollo, puede OEM o personalizar a nosotros.
Podemos suministrar placas y carcasas sin logotipo, cómodas para que los usuarios las revendan o desarrollen sus propios programas. Los equipos sin logotipo también disfrutan de garantía y servicio posventa. Proporcionamos un ID de hardware exclusivo, que resulta cómodo para que los usuarios utilicen y gestionen los equipos, y podemos cifrar el software/hardware mediante la lectura del ID de hardware, lo que protege en gran medida los resultados de desarrollo de los usuarios. Nuestra empresa proporciona a los usuarios VB, VC, C#, .NET, Labview, labwindows, delphi y otros programas de ejemplo y códigos fuente. Proporcionamos materiales de desarrollo secundarios como API y manual de llamadas a funciones.
Características
Adaptador para conexión USB (USB 1.1, compatible con USB 2.0);
Alimentación de tensión USB;
Velocidades en baudios de hasta 1 Mbit/s Resolución del sello de tiempo 1μs;
Cumple las especificaciones CAN 2.0A (ID de 11 bits) y 2.0B (ID de 29 bits);
Conexión CAN-Bus mediante DB9;
Controlador CAN NXP SJA1000;
Transceptor CAN NXP PCA82C251;
Soporta el software ECAN Tools;
Aislamiento galvánico en la conexión CAN hasta 1500 V;
Rango de temperatura de funcionamiento ampliado de -40 a 85 °C;
El controlador del dispositivo y el software son compatibles con Windows 2000/2003/XP/7/8/10 y Linux;
Tamaño: (L)55mm * (A)35mm * (A)14mm, cable 0,9m.
Nuestros servicios
Embalaje
1. Embalaje estándar. Cartón
2. Diseño personalizado
Plazo de entrega
2~5 días después de la recepción de su pago.
Posventa
Servicio postventa telefónico 24 horas
Asistencia técnica
GCAN ofrece un año de garantía postventa gratuita, software gratuito de por vida y asistencia técnica.
Manual del usuario(Haga clic para verlo)
Convertidor USBCAN-Mini