




Producto Introducción
Descripción
El adaptador USBCAN-I pro es una herramienta de análisis para el bus CAN que puede crear una conexión entre el PC y la red CAN. Puede hacer visibles los datos CAN con el software ECANtools y realizar la transmisión/recepción de datos CAN y otras funciones. Si el usuario desea desarrollar un programa de aplicación, GCAN proporciona el código de demostración de la aplicación, incluyendo VC, VB,.net, Delphi, Labview y C++Builder y otras rutinas de desarrollo.
Especificaciones
|
Físico
|
||
|
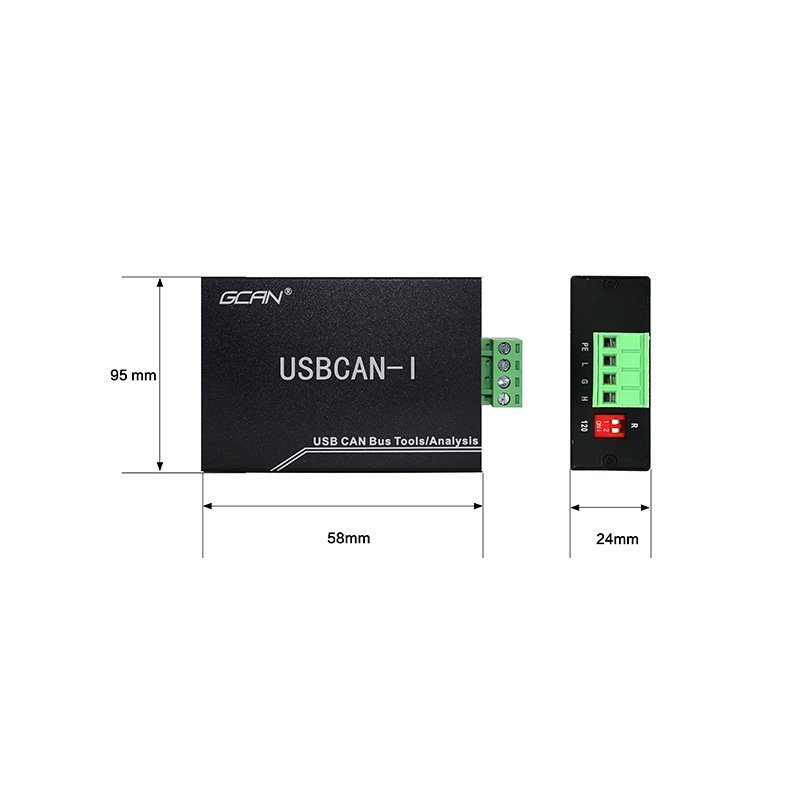
Tamaño (LxAxA)
|
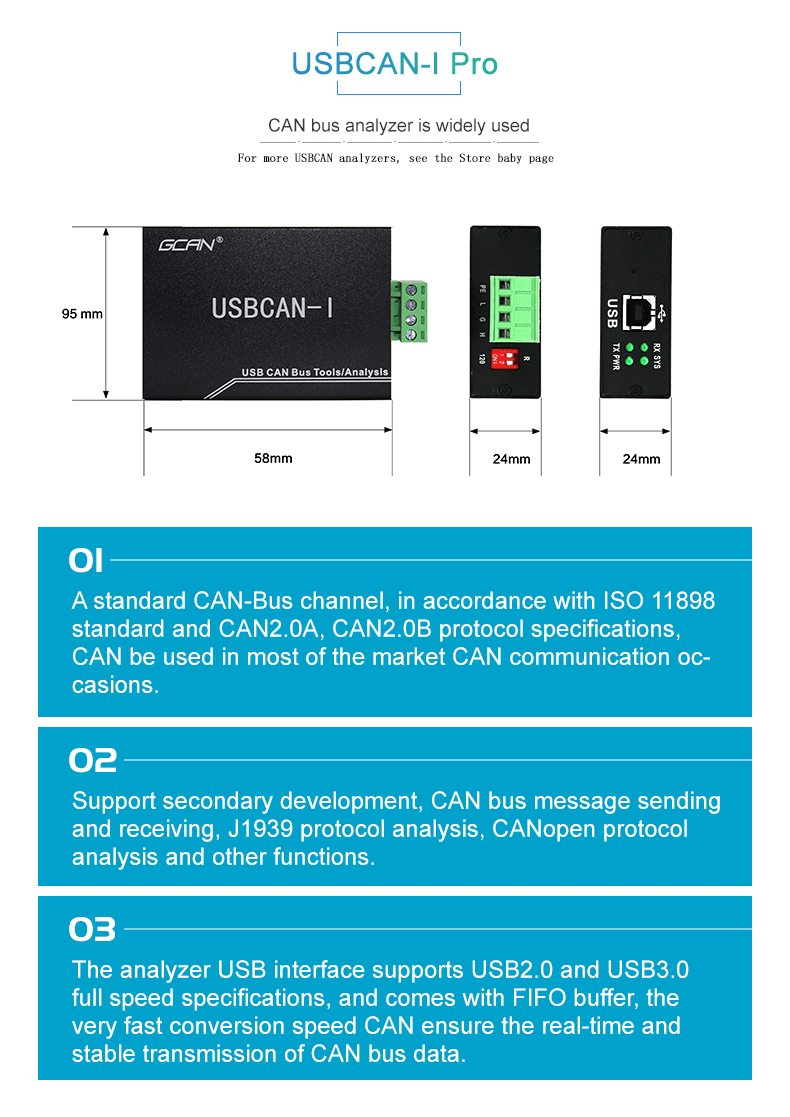
95 x 58 x 24 mm
|
|
|
Peso
|
aprox. 90 g
|
|
|
Temperatura de funcionamiento
|
-40°C~85°C
|
|
|
Humedad
|
15 a 95% sin condensación
|
|
|
Conectividad
|
||
|
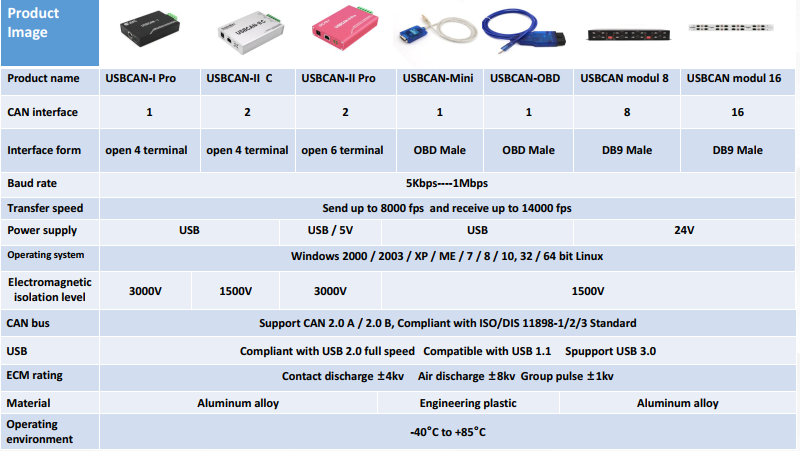
Canal CAN
|
1
|
|
|
Conector CAN
|
Bloque de terminales abierto de 4 patillas
|
|
|
Interfaz CAN
|
Conforme a CAN 2.0A, CAN 2.0, conforme a ISO11898-2
|
|
|
Velocidad de transmisión CAN
|
5kbit/s a 1Mbit/s
|
|
|
Interfaz USB
|
USB 2.0, compatible con USB 1.1 y USB 3.0
|
|
|
Aislamiento
|
Aislamiento eléctrico DC 3000V
|
|
|
Recibir maxinum
|
14000 fps
|
|
|
Transmitir máx.
|
8000fps
|
|
|
Resistencia CAN
|
120Ω,selección mediante interruptor Dip
|
|
|
Alimentación
|
||
|
Fuente de alimentación
|
Alimentación USB
|
|
|
Actual
|
Máx. 130 mA
|
|
|
Software
|
||
|
Soporte informático
|
Herramientas ECAN
|
|
|
Sistema operativo
|
Windows XP/7/8/10,etc y Linux de 32/64 bits
|
|
|
Entorno de desarrollo
|
VC、VB、.Net、Delphi、Labview,C++Builder
|
|
Funciones
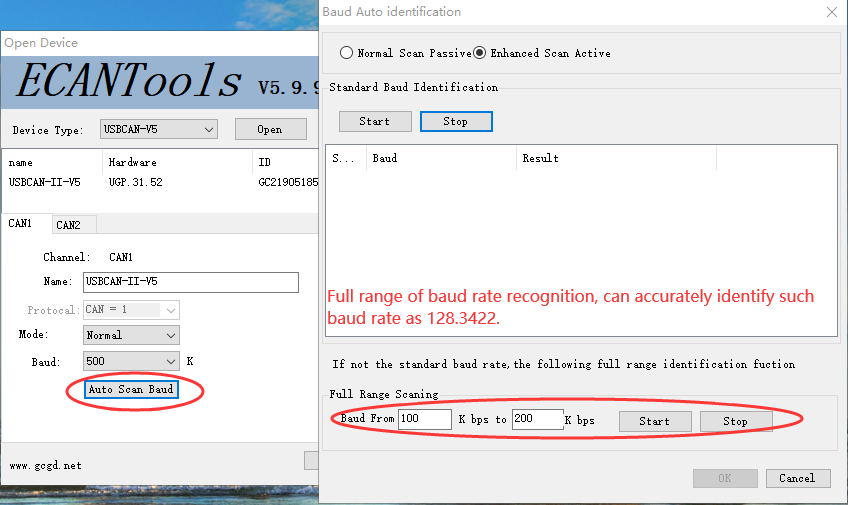
1.Función de reconocimiento automático de la velocidad de transmisión
Puede identificar automáticamente la velocidad en baudios de un bus con una velocidad en baudios desconocida. Siempre que se trate de un bus CAN activo, el equipo de nuestra empresa puede identificar su velocidad en baudios. Hay dos formas de identificar la velocidad en baudios:
A: Reconocimiento de la velocidad de transmisión estándar.(1000K, 500K, 250K...)
B: Rango completo de reconocimiento de velocidad en baudios (establece el rango de inicio y fin, escanea la velocidad en baudios en el rango).
Esta función puede enviar y recibir datos después de identificar los dispositivos con velocidad de transmisión desconocida, y también se puede utilizar para probar la velocidad de transmisión de los dispositivos de comunicación CAN de nuevo desarrollo.


Función de cambio de idioma: el software admite chino e inglés
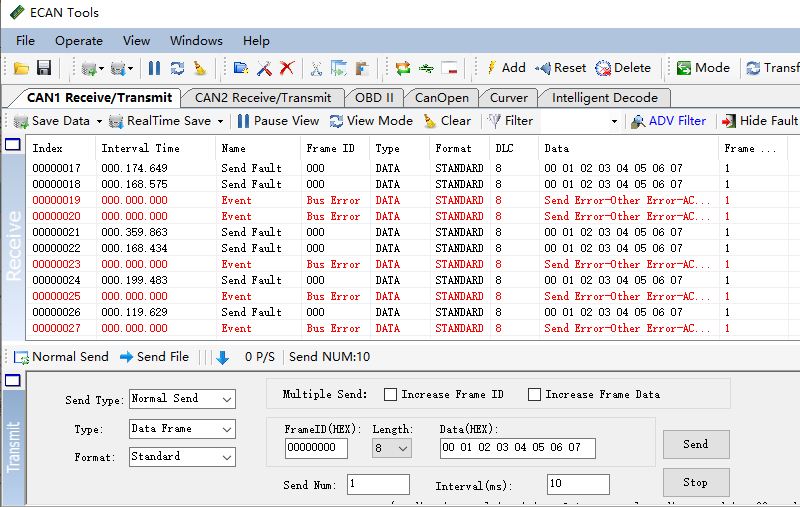
Función de extracción de magnitudes físicas y visualización gráfica: Después de que el software cargue el archivo DBC, puede mostrar los cambios de datos en tiempo real mediante gráficos, curvas, etc. El usuario puede analizar los datos observando la curva o el gráfico. El software también puede soportar la carga de protocolos personalizados, y se pueden dibujar gráficos y curvas después de cargar protocolos definidos por el usuario.
Desarrollo secundario
Características
- Adaptador para conexión USB (USB 1.1, compatible con USB 2.0);
- Alimentación de tensión USB;
- Velocidades de bits de hasta 1 Mbit/s Resolución del sello de tiempo 1μs;
- Cumple las especificaciones CAN 2.0A (ID de 11 bits) y 2.0B (ID de 29 bits);
- Conexión CAN-Bus a través de OPEH4, PHOENIX;
- Controlador CAN NXP SJA1000;
- Transceptor CAN NXP PCA82C251;
- Soporta el software ECAN Tools;
- Aislamiento galvánico en la conexión CAN hasta 1500 V;
- Rango de temperatura de funcionamiento ampliado de -40 a 85 °C;
- El controlador del dispositivo y el software son compatibles con Windows 2000/2003/XP/7/8/10 y Linux;
- Tamaño: (L)95mm * (W)57mm * (H)24mm.
Nuestros servicios
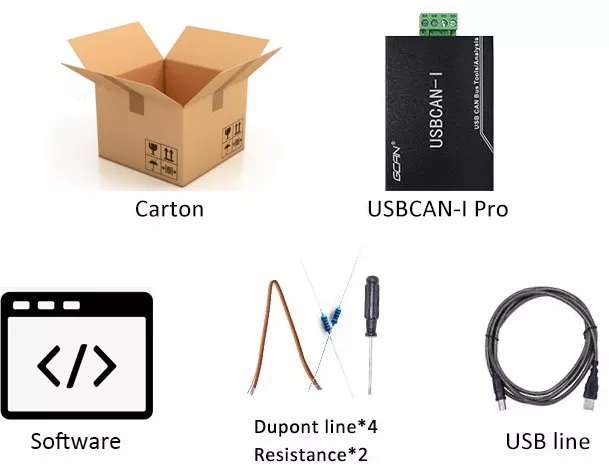
Embalaje
Plazo de entrega
2~5 días después de la recepción de su pago.
Posventa
Servicio postventa telefónico 24 horas
Asistencia técnica
GCAN ofrece un año de garantía postventa gratuita, software gratuito de por vida y asistencia técnica.
Manual del usuario(Haga clic para verlo)
Adaptador USBCAN-I Pro