4. Программное обеспечение ECANTools
ECANTools - это профессиональное программное обеспечение для отладочного анализа при разработке на платформе Windows.
4.1 Запуск программного обеспечения
1. Если у пользователя установлено программное обеспечение ECANTools, дважды щелкните "ECANTools", чтобы открыть его.
После выбора соответствующего типа оборудования, нажмите кнопку "открыть оборудование", чтобы появился CAN
Оборудование.

2. После выбора соответствующего типа оборудования нажмите кнопку "открыть оборудование", чтобы появился CAN
Оборудование.
3 дополнительных режима:
нормальный режим: соответствует приему/передаче данных программного обеспечения;
Режим прослушивания: предназначен для мониторинга шины, которая не должна быть нарушена, не для передачи данных;
Режим loopback: позволяет проверить, что CAN связь оборудования USBCAN в норме;
4. Выберите скорость передачи данных: пользователь должен установить ее в соответствии с практической скоростью передачи данных шины.
Примечание: Пожалуйста, свяжитесь с нами, если вам нужно настроить скорость передачи данных.Когда пользователь не знает скорость передачи данных
скорость, также может определять скорость передачи данных автоматически.
4.2. прием/передача данных
Получение/передача данных - основная функция ECANTools.Пользователь может видеть
прием/передача данных напрямую.
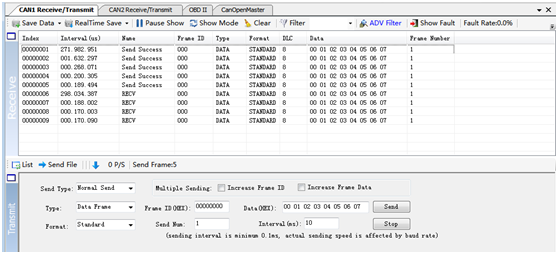
Кроме этих основных функций, в программе есть функция отправки документов.
Обычная отправка: отправка документа на узел шины, может разрабатывать программирование шины CAN-Bus для
скачать программное обеспечение.
Отправка пакетного файла: зарезервированный пакетный файл повторно отправляется на шину CAN-Bus в порядке резервирования и
Данные.
4.3 Функция диагностики шины CAN-Bus
Функция диагностики шины CAN-Bus может обнаружить кадры ошибок шины и потерю арбитража шины.

Индикация состояния шины CAN: Индикация состояния шины CAN: шина в норме, пассивная ошибка, активная ошибка, шина выключена.
Переполнение FIFO контроллера CAN: Сообщения слишком плотные, что приводит к потере данных в течение определенного периода времени.
Сигнализация ошибок контроллера CAN: когда на шине происходит много ошибок, счетчик ошибок превышает
порог тревоги и отображение количества ошибок.
Негативная ошибка контроллера CAN: когда произошло много ошибок при передаче или приеме, что приводит к
контроллер CAN в отрицательное состояние и отобразить ошибку
считать.
Потерян арбитраж CAN-контроллера: когда этот узел не смог конкурировать по CAN-шине с другими
оборудование, вооруженное сообщение попытается отправить в следующий раз, и
выберите соответствующую информацию об ошибке для отображения.
Ошибка контроллера CAN: когда CAN-Bus отправляет или получает ошибки, значение счетчика ошибок будет накапливаться, и может поймать неправильную информацию, такую как ACK, ошибка CRC и так далее.
Переполнение буфера данных CAN: отсутствие обмена данными для вычисления в течение времени, приводит к тому, что количество сообщений в хранилище превышает ограничение емкости прошивки, и новое полученное сообщение покрывает самое раннее сообщение.
4.4 Функция реле и автономная функция
Функция реле CANBus-II Pro может передавать друг другу одинаковые или разные данные шины CAN, а поток данных можно наблюдать через компьютер.
Настройка автономного режима, пользователь может использовать блокнот (. TXT) инструкции, загрузить его в CAN устройства, после загрузки CAN питания может работать в автономном режиме в соответствии с инструкциями в блокноте, автономные инструкции: отправить, время задержки и срабатывания отправки, получения модифицированного отправить часто используемые функции.
4.5 Другие функции
Сохранение данных/живое сохранение
пауза
режим отображения
очистить данные
Настройки фильтра
усовершенствованная маска
город ошибок на дисплее
Плагин OBDII
Главная станция CANopen
Внимание: Пользователь может найти больше функций в ECANTools.
5.Вторичное развитие
Предлагает библиотеку функций стандартного интерфейса: ECANVCI.h、ECANVCI.lib、ECANVCI.dll.