4 Подключение к преобразователю
4.1 Электропитание
GCAN-4055 поддерживает питание +9-30В постоянного тока. Рекомендуется использовать стабилизированный источник питания 12В или 24В постоянного тока.
4.2 Подключение к шине CAN-Bus
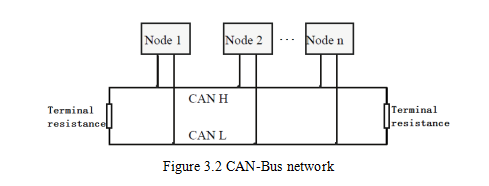
При практическом использовании необходимо соединить CAN_H с CAN_H и CAN_L с CAN_L, тогда связь может быть реализована.
Примечание: Сеть CAN-Bus имеет топологическую структуру, только два самых дальних терминала нуждаются в подключении сопротивления 120Ω между CAN_H и CAN_L. См. рисунок 3.2.
4.3 Системный светодиодный индикатор
GCAN-4055 имеет один индикатор PWR, один индикатор COM и один индикатор CAN для отображения состояния конвертера. Другие функции приведены в таблице 3.2.

5 Пример применения
Примечание: Для всех ведомых станций в этой главе установлено значение 1.
В этой главе мы будем использовать конвертер USBCAN-II Pro и программное обеспечение ECANTools для получения и отправки данных CAN-Bus.
Вы можете приобрести его по контактной информации на последней странице данного руководства. Вы можете подключить конвертер CAN1 канала USBCAN-II Pro к CAN-Bus каналу Gcan-4055. Затем откройте программу ECANTools и выберите правильную скорость передачи данных.
5.1 Команда "Пуск
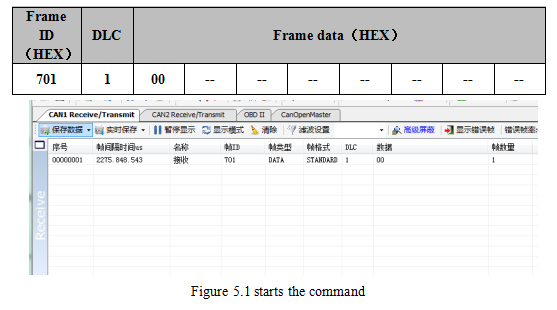
GCAN-4055 отправит один кадр на главную станцию.
Идентификатор кадра - 0x700+идентификатор узла(X). Длина данных равна 1. Данные кадра равны 0x00.

Например, GCAN-4055 будет автоматически отправлять данные при запуске.
Конвертер USBCAN-II Pro может принимать эти данные и отображать их, как показано на рисунке 5.1.
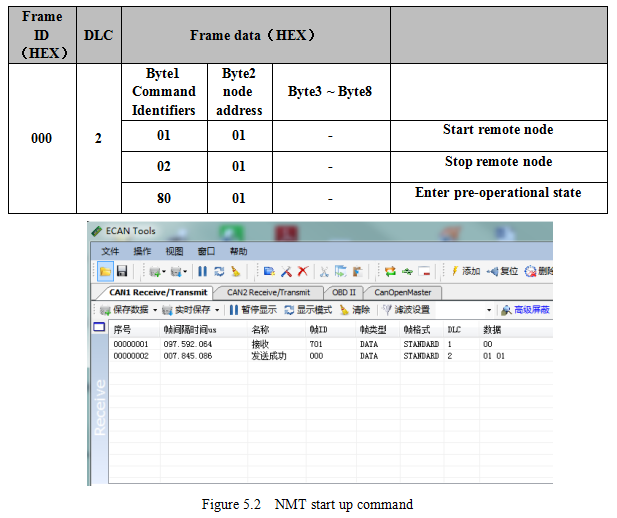
5.2 Команда NMT (управление сетью)
Пользователи могут использовать команду NMT мастер-станции CANopen или вручную смоделировать протокол CANopen для управления запуском или остановкой GCAN-4055. Данные модуля запуска при ручной симуляции протокола CANopen приведены в следующей таблице.