5.3 Команда PDO
TPDO1 в GCAN-4055 используется для индикации состояния входа и выхода. Каждый из них представлен одним байтом. RPDO1 используется для изменения состояния цифрового выхода. Он управляется одним байтом.
5.3.1 Команда RPDO (RPDO1, отправляется ведущей станцией)
Пользователи могут отправлять данные с помощью мастер-станции CANopen или ручной симуляции. Вы можете установить состояние выхода модуля GCAN-4055. Идентификатор кадра - 0x200+идентификатор узла(X). Первый байт данных кадра используется для установки состояния выхода, каждый бит, установленный в 1, означает выход, 0 - отсутствие выхода.
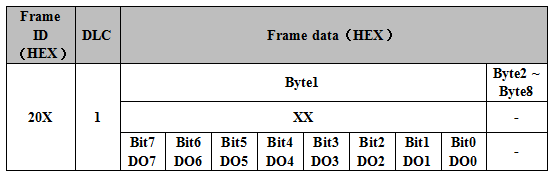
Например, состояние DO_3 модуля установлено на выход, а остальные состояния DO - без выхода. Вы можете отправить данные, как показано в таблице ниже и на рисунке 3 на рисунке 5.4.
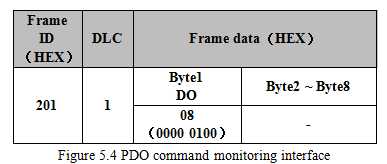
GCAN-4055 получает данные, как показано в таблице третьих данных на рисунке 5.5.
5.3.2 Команда TPDO (TPDO1, отправляется GCAN-4055)
GCAN-4055 использует TPDO для передачи текущего состояния входа и выхода. Идентификатор кадра равен 0x180 + идентификатор узла (X). Длина данных - 2. Первый байт - состояние входа, второй байт - состояние выхода. Каждый бит 1 означает вход/выход, 0 - отсутствие входа/выхода. GCAN-4055 имеет два вида режимов передачи TPDO. Режим триггера и режим циркуляции.
По умолчанию установлен режим триггера, в этом режиме, только при изменении DI или DO, GCAN-4055 будет посылать данные TPDO.
В режиме циркуляции GCAN-4055 посылает данные TPDO каждые 100 мс (время цикла может быть изменено). В это время отображается состояние DI и DO.
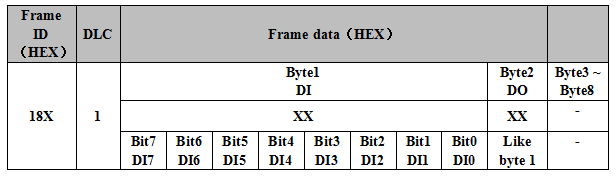
Например, все состояния DI - нет входа, состояние DO3 - выход, а остальные состояния DO - нет выхода. GCAN-4055 отправляет данные, как показано в таблице ниже и четвертые данные на рисунке 5.5.

5.4 Команда SDO
Пользователь может отправить SDO-инструкции для изменения режима передачи TPDO GCAN-4055 через мастер-станцию CANopen или ручную симуляцию. Существует два типа рабочих режимов, которые могут быть установлены - режим триггера (по умолчанию) и режим циркуляции.
5.4.1 Конфигурация кругового узора
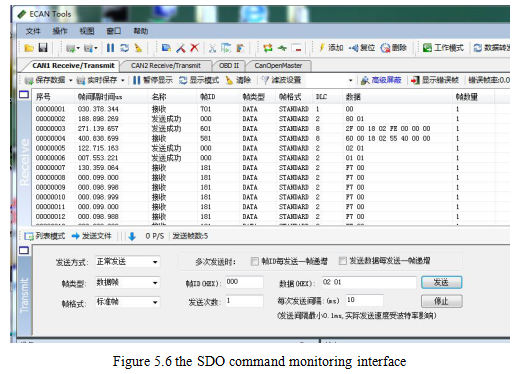
Режим циркуляции показан на рисунке 5.6. После входа в режим циркуляции GCAN-4055 время от времени посылает TPDO на ведущую станцию.
Способ установки:
① Переведите GCAN-4055 в предоперационное состояние (см. 5.2).
② Отправьте на GCAN-4055 кадр с идентификатором 601, данные кадра - 2F 00 18 02 FE 00 00 00. После успешной доставки идентификатор кадра в ответе GCAN-4055 будет 581, данные кадра - 60 00 18 02 XX XX XX. Это означает, что изменение прошло успешно.
③ Отправьте команду Start remote node (см. 5.2) для запуска конвертера, GCAN-4055 отправляет один TPDO-данный каждые 100 мс (по умолчанию). Это означает успешное выполнение схемы циркуляции конфигурации.
Примечание: Если вам необходимо изменить время интервала в режиме циркуляции. После второго шага отправьте кадр ID 601 в GCAN-4055. Данные кадра имеют вид 2F 00 20 01 XX 00 00 00. Красная часть - изменение временного интервала (шестнадцатеричное), максимум FF, единица измерения мс.
5.4.2 Спецификация конфигурации режима триггера (режим по умолчанию)
Режим триггера показан на рисунке 5.7, GCAN-4055 посылает TPDO ведущей станции только при изменении IO.
Способ установки:
① Переведите GCAN-4055 в предоперационное состояние (см. 5.2).
② Отправьте идентификатор кадра на преобразователь 601, и данные кадра будут 2F 00 18 02 FF 00 00 00. После успешной доставки идентификатор кадра ответа модуля будет равен 581, а данные кадра - 60 00 18 02 XX XX XX.
③ После успешной настройки отправьте команду запуска удаленного узла (см. 5.2), чтобы запустить конвертер. Конвертер отправляет только TPDO-данные, указывающие на успешность настройки режима циркуляции.