3. Используемый адаптер
3.1 Время системы коррекции
В GCAN-401 встроены системные часы, системные часы и файловая система могут записывать данные по дате.
GCAN-401 будет создавать папку каждый день, названную по дате. Данные о шинах будут автоматически помещаться в соответствующую папку.
GCAN-401 будет создавать новый файл каждую минуту, данные будут сохраняться в соответствующем файле.
Если системные часы адаптера GCAN-401 не соответствуют реальным перед использованием, пользователь может настроить собственное время следующими способами.
1. С помощью USB-кабеля соедините GCAN-401 и ПК. (USB-порт на рисунке 3.2).
2. С помощью помощника последовательной отладки отправьте время на адаптер.
(Скорость передачи данных последовательного порта: 115200, биты данных: 8, стоп-бит: 1, бит четности Нет, инструкция: "NT = XXX". Например: отправьте "NT = 20170329215500", это изменит системное время на 29 марта 2017 21:55:00. Пожалуйста, обратите внимание, что отправлять и получать нужно в ASCII и выбрать "отправить новую строку", не выбирайте "hex").
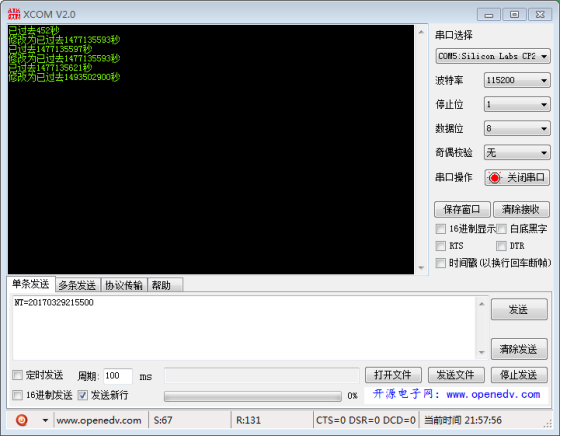
Рисунок 3.1 Временной интерфейс системы коррекции GCAN-401
3.2 Конфигурация шины CAN
Адаптер GCAN-401 обычно требует от пользователей настройки параметров связи CAN-Bus в соответствии с реальными потребностями перед использованием.
3.2.1 Конфигурация скорости передачи данных CAN-шины
GCAN-401 может поддерживать некоторые часто используемые скорости передачи данных в диапазоне 10K~1000K. Скорость передачи данных может быть установлена с помощью кодового переключателя, положение кодового переключателя показано на рисунке 3.2.

Рисунок 3.2 Профиль GCAN-401
Кодовый переключатель "1, 2, 3, 4" может установить скорость передачи данных CAN-Bus, а другой переключатель (5, 6, 8) имеет специальное определение, по умолчанию сторона вниз, пожалуйста, не устанавливайте произвольно. Наберите кодовый переключатель вниз, по умолчанию 0, каждая скорость передачи данных, как показано в таблице 3.1.
Примечание: Для изменения скорости передачи данных необходимо отключить питание.

Таблица 3.1 Таблица конфигурации скорости передачи данных GCAN-401
3.2.2 Конфигурация сопротивления клемм CAN-Bus
В GCAN-401 встроен внутренний терминальный резистор 120Ω, пользователи могут выбирать, будет ли доступ осуществляться через переключатель кода.
3.3 Подключение к CAN
Адаптер CANCOM подключается к шине CAN-Bus в соответствии с главой 2.2, CAN_H к CAN_H, CAN_L к CAN_L.
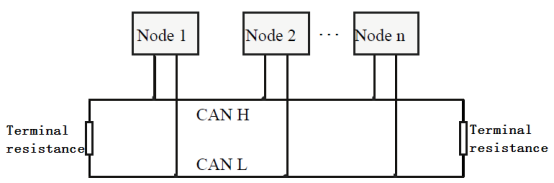
Сеть CAN-шины имеет топологическую структуру, только два самых дальних терминала должны быть подключены к сопротивлению 120Ω между CAN_H и CAN_L. Для соединения ветвей их длина не должна превышать 3 м. Соединение узлов CAN-шины показано на рисунке 3.1
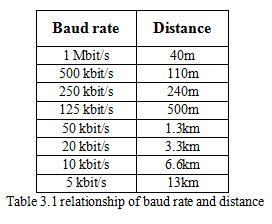
Примечание: в качестве кабеля CAN-шины может использоваться обычная витая пара, экранированная витая пара. Теория максимального расстояния связи зависит от скорости передачи данных по шине, их соотношение показано в таблице 3.1.
3.4 Сопротивление клемм CAN-Bus
Для повышения надежности связи и устранения отражений от клемм CAN-шины, две самые дальние клеммы необходимо соединить клеммным сопротивлением между CAN_H и CAN_L, как показано на рисунке 3.2. Значения сопротивления терминала определяются характеристическим сопротивлением кабелей. Например, характеристический импеданс составляет 120Ω.
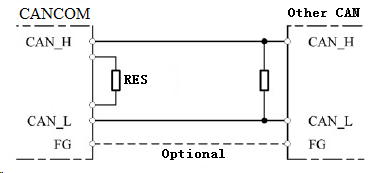
Примечание: адаптер CANCOM не имеет встроенного терминального сопротивления 120Ω, пользователи должны подключить его при необходимости.
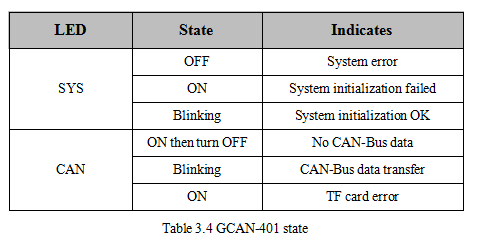
3.5 Системный светодиодный индикатор
Адаптер GCAN-401 с одним индикатором SYS, одним индикатором CAN для отображения состояния адаптера. Дополнительные функции приведены в таблице 3.3 и 3.4.
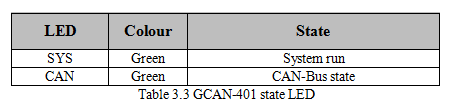
Когда адаптер GCAN-401 включен, светодиодный индикатор SYS мигает, указывая на то, что адаптер имеет питание, система инициализирована; в противном случае имеет место сбой питания системы или системные ошибки.
При включении питания горящий светодиод CAN указывает на ошибку TF-карты.
Когда светодиод CAN загорается, а затем гаснет, это означает, что TF-карта работает нормально.
Когда адаптер получает данные, светодиодный индикатор CAN начинает мигать.