4. Software ECANTools
El software ECANTools es un software profesional de análisis de depuración para el desarrollo de plataformas Windows.
4.1 Iniciar el software
1. Si el usuario ha instalado el software ECANTools, puede hacer doble clic en "ECANTools" para abrirlo.
Después de seleccionar el tipo de equipo correspondiente, haz clic en "Abrir equipo" para que aparezca CAN.
Equipamiento.

2. Después de seleccionar el tipo de equipo correspondiente, haga clic en "Abrir equipo" para que aparezca CAN.
Equipamiento.
3 modos opcionales:
modo normal: se ajusta a la recepción/transmisión de datos del software;
Modo escucha: sirve para monitorizar el Bus que no se interrumpe, no para transmitir datos;
Modo loopback: puede comprobar si la comunicación CAN del equipo USBCAN es normal;
4. Seleccione la velocidad en baudios: El usuario debe configurarla según la velocidad en baudios del bus.
Nota: Por favor, póngase en contacto con nosotros si necesita personalizar la velocidad en baudios.
también puede identificar la velocidad de transmisión automáticamente.
4.2. recibir/transmitir datos
Recibir/transmitir datos es la función principal de ECANTools.El usuario puede ver el
recibir/transmitir directamente mensajes de datos.
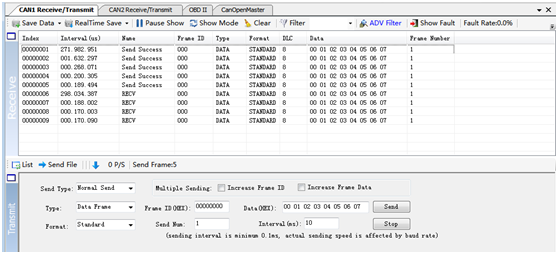
Además de estas funciones básicas, el programa tiene una función de envío de documentos.
Envío ordinario:Envío de documento a nodo de Bus,puede desarrollar programación CAN-Bus a
descargar software.
Envío de archivos por lotes:El archivo por lotes reservado se reenvía al bus CAN en el orden reservado y
Datos.
4.3 Función de diagnóstico del bus CAN
La función de diagnóstico del bus CAN puede detectar las tramas de error del bus y la pérdida de arbitraje del bus.

Indicación del estado del bus CAN: Indica el estado del bus CAN: bus normal, error pasivo, error activo, bus apagado.
Desbordamiento del FIFO del controlador CAN: Los mensajes son demasiado densos para la pérdida de datos dentro de un período de tiempo.
Alarma de error del controlador CAN: cuando se producen muchos errores en el bus, el contador de errores excede
el umbral de alarma, y mostrar el recuento de errores.
Error negativo del controlador CAN: cuando se producen muchos errores de transmisión o recepción, provoca
el controlador CAN al estado negativo, y mostrar el error
cuenta.
Pérdida de arbitraje del controlador CAN: cuando este nodo no puede competir en el bus CAN con otros nodos.
equipo, el mensaje armado trataría de enviar la próxima vez, y
captura la información de error correspondiente para mostrarla.
Error del controlador CAN: cuando el bus CAN envía o recibe errores, el valor del contador de errores se acumula y puede detectar información errónea, como ACK, error CRC, etc.
Desbordamiento del búfer de datos CAN: sin intercambio de datos para calcular durante un tiempo, el número de mensajes almacenados excede la limitación de capacidad del firmware, y el nuevo mensaje recibido cubre el mensaje más antiguo.
4.4 Función relé y función offline
La función de relé CANBus-II Pro puede transmitir los mismos o diferentes datos de bus CAN entre sí, y el flujo de datos se puede ver a través del ordenador.
Configurar el modo fuera de línea, el usuario puede utilizar el bloc de notas (. TXT) las instrucciones, descargarlo en el dispositivo CAN, después de descargar la energía CAN puede trabajar en modo fuera de línea de acuerdo con las instrucciones en el bloc de notas, las instrucciones fuera de línea: enviar, tiempo de retardo y desencadenar el envío, recepción modificada enviar funciones de uso común.
4.5 Otras funciones
Guardar datos/guardar en vivo
pantalla de pausa
modo de visualización
borrar datos
filtro Ajustes
máscara avanzada
mostrar error ciudad
Plugin OBDII
Estación principal CANopen
Atención: El usuario puede encontrar más funciones en las ECANTools.
5.Desarrollo secundario
Ofrecer biblioteca de funciones de interfaz estándar: ECANVCI.h、ECANVCI.lib、ECANVCI.dll.