4 Conectar al convertidor
4.1 Alimentación eléctrica
GCAN-4055 admite una fuente de alimentación de +9-30V CC. Recomendamos utilizar una fuente de alimentación estabilizada de 12 V o 24 V CC.
4.2 Conexión al bus CAN
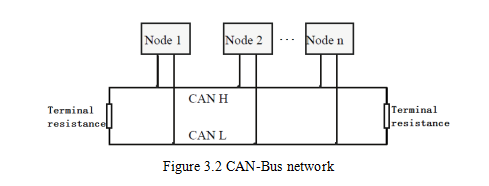
En el uso práctico, conectando CAN_H a CAN_H y CAN_L a CAN_L, se puede realizar la comunicación.
Nota: La red CAN-Bus adopta una estructura topológica, sólo los dos terminales más alejados necesitan conectar una resistencia de terminal de 120Ω entre CAN_H y CAN_L. Véase la figura 3.2.
4.3 LED del sistema
El GCAN-4055 dispone de un indicador PWR, un indicador COM y un indicador CAN para indicar el estado del convertidor. En la tabla 3.2 se muestran más funciones.

5 Ejemplo de aplicación
Nota: Todas las estaciones esclavas de este capítulo están ajustadas a 1.
En este capítulo se utilizará el conversor USBCAN-II Pro y el software ECANTools para recibir y enviar datos CAN-Bus.
Puede adquirirlo a través de la información de contacto que aparece en la última página de este manual. Puede conectar el convertidor USBCAN-II Pro canal CAN1 al canal CAN-Bus del Gcan-4055. A continuación, abra el software ECANTools y seleccione la velocidad de transmisión correcta.
5.1 Orden de inicio
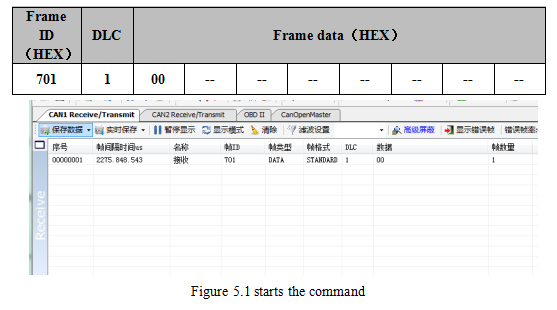
GCAN-4055 enviará una trama a la estación maestra.
El ID de trama es 0x700+ID de nodo(X). La longitud de los datos es 1. Los datos de la trama son 0x00.

Por ejemplo, GCAN-4055 enviará automáticamente un dato cuando se inicie.
El conversor USBCAN-II Pro puede recibir estos datos y mostrarlos, como se muestra en la figura 5.1.
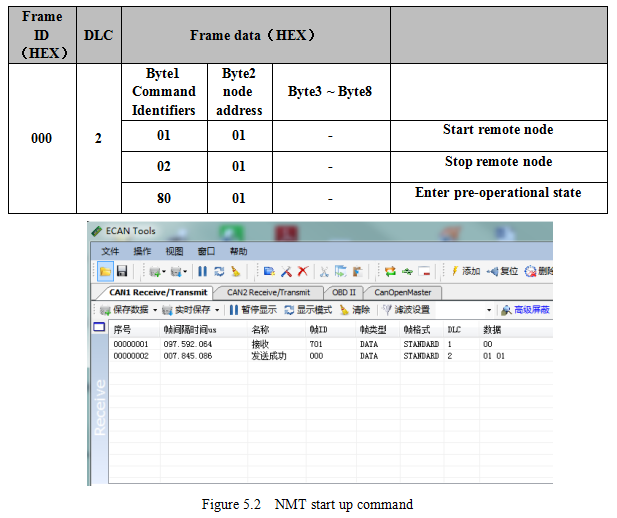
5.2 Comando NMT(Gestión de red)
Los usuarios pueden utilizar el comando NMT de la estación maestra CANopen o simular manualmente el protocolo CANopen para controlar el arranque o la parada del GCAN-4055. La simulación manual de los datos del módulo de puesta en marcha del protocolo CANopen se muestra en la siguiente tabla.