5.3 Comando PDO
TPDO1 del GCAN-4055 se utiliza para indicar el estado de entrada y salida. Cada uno de ellos está representado por un byte. RPDO1 se utiliza para cambiar el estado de la salida digital. Está controlado por un byte.
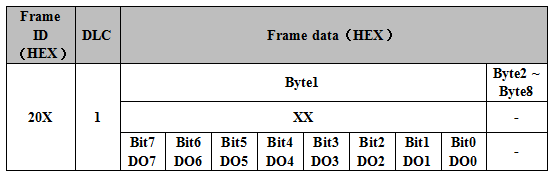
5.3.1 Comando RPDO (RPDO1, enviado por la estación maestra)
Los usuarios pueden enviar datos utilizando la estación maestra CANopen o la simulación manual. Puede configurar el estado de salida del módulo GCAN-4055. El ID de trama es 0x200+ID de nodo(X). La longitud de los datos es 1. El primer byte de los datos de la trama se utiliza para establecer el estado de salida, cada bit establecido en 1 representa la salida, 0 representa que no hay salida.
Por ejemplo, el estado DO_3 del módulo se establece como salida, y el estado DO restante es sin salida. Puede enviar los datos como se muestra en la tabla siguiente y en la figura 3 de la figura 5.4.
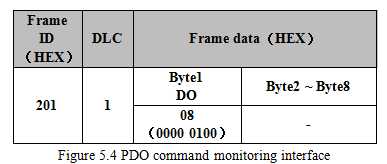
GCAN-4055 recibe los datos como se muestra en la tabla del tercer dato de la figura 5.5.
5.3.2 Comando TPDO (TPDO1, enviado por GCAN-4055)
GCAN-4055 utiliza TPDO para enviar el estado actual de entrada y salida. El ID de trama es 0x180 + ID de nodo (X). La longitud de los datos es 2. El primer byte es el estado de entrada, y el segundo byte es el estado de salida. Cada bit es 1 representa entrada/salida, 0 representa ninguna entrada/salida. GCAN-4055 tiene dos tipos de modos de transmisión TPDO. Modo de disparo y modo de circulación.
Por defecto es modo trigger, en este modo, sólo cuando DI o DO cambien, GCAN-4055 enviará datos TPDO.
En el modo de circulación, GCAN-4055 envía un dato TPDO cada 100ms(El tiempo de ciclo puede ser cambiado). Muestra el estado de DI y DO en ese momento.
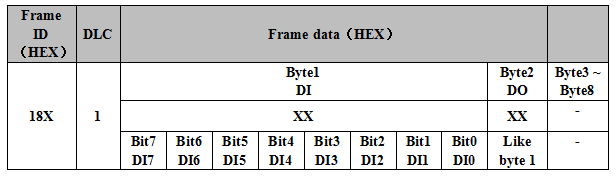
Por ejemplo, todos los estados DI son no entrada, y el estado DO3 es salida, y el resto de estados DO son no salida. GCAN-4055 envía los datos como se muestra en la siguiente tabla y el cuarto dato de la figura 5.5.

5.4 Comando SDO
El usuario puede enviar las instrucciones SDO para modificar el modo de transmisión TPDO del GCAN-4055 a través de la estación maestra CANopen o de la simulación manual. Hay dos tipos de modos de trabajo que se pueden configurar - modo de disparo (por defecto) y modo de circulación.
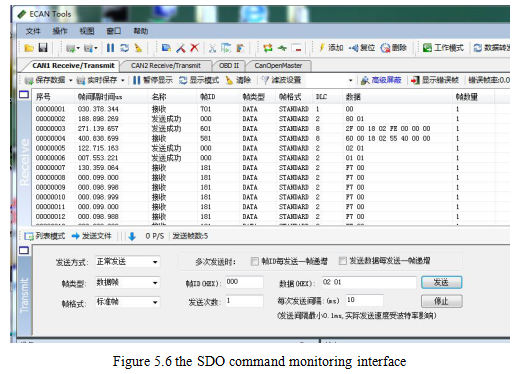
5.4.1 Configuración del patrón circular
El modo de circulación se muestra en la figura 5.6. Después de entrar en el modo de circulación, GCAN-4055 envía TPDO a la estación maestra de vez en cuando.
Método de ajuste:
① Poner el GCAN-4055 en estado preoperativo (véase 5.2).
② Envíe una trama ID de 601 a GCAN-4055, los datos de la trama son 2F 00 18 02 FE 00 00 00 00. La ID de trama de la respuesta de GCAN-4055 será 581 después de la entrega exitosa, los datos de la trama son 60 00 18 02 XX XX XX. Esto indica que el cambio se ha realizado correctamente.
③ Enviar el nodo remoto Start (ver 5.2) para iniciar el conversor, GCAN-4055 envía un dato TPDO cada 100ms (por defecto). Este es el éxito del patrón de circulación de configuración.
Nota: Si necesita cambiar el tiempo de intervalo del modo de circulación. Después del segundo paso, envíe la trama ID 601 al GCAN-4055. Los datos de la trama son 2F 00 20 01 XX 00 00 00. La parte roja es el cambio en el intervalo de tiempo(Hexadecimal), máximo FF, unidad ms.
5.4.2 Especificación de la configuración del modo de disparo (modo por defecto)
El modo de disparo se muestra en la figura 5.7, GCAN-4055 sólo envía TPDO a la estación maestra cuando se cambia IO.
Método de ajuste:
① Poner el GCAN-4055 en estado preoperativo (véase 5.2).
② Envía el ID de trama al convertidor 601, y los datos de la trama son 2F 00 18 02 FF 00 00 00. La ID de trama de la respuesta del módulo será 581 después de la entrega exitosa, y los datos de la trama serán 60 00 18 02 XX XX XX.
③ Tras el éxito de la configuración, envíe el nodo remoto de arranque (véase 5.2) para arrancar el convertidor. El convertidor sólo envía un dato TPDO indicando que el modo de circulación configurado es correcto.