4. ECANTools 소프트웨어
ECANTools 소프트웨어는 Windows 플랫폼 개발을 위한 전문 디버깅 분석 소프트웨어입니다.
4.1 소프트웨어 시작
1. 사용자가 ECANTools 소프트웨어를 설치한 경우, "ECANTools"를 더블클릭하여 열 수 있습니다.
해당 장비 유형을 선택한 후 "장비 열기"를 클릭하면 CAN이 나타납니다.
장비.

2. 해당 장비 유형을 선택한 후 "장비 열기"를 클릭하면 CAN이 나타납니다.
장비.
3가지 옵션 모드:
일반 모드: 소프트웨어의 데이터 수신/전송을 준수합니다;
수신 모드: 데이터를 전송하지 않고 방해받지 않는 버스를 모니터링하기 위해 준수합니다;
루프백 모드: USBCAN 장비의 CAN 통신이 정상인지 테스트할 수 있습니다;
4. 전송 속도 선택: 사용자가 실제 버스 전송 속도로 설정해야 합니다.
참고: 전송 속도를 사용자 지정해야 하는 경우 당사에 문의하시기 바랍니다.
전송 속도를 자동으로 식별할 수도 있습니다.
4.2. 데이터 수신/전송
데이터 수신/전송은 ECANTools의 주요 기능이며, 사용자는 다음을 볼 수 있습니다.
데이터 메시지를 직접 수신/전송할 수 있습니다.
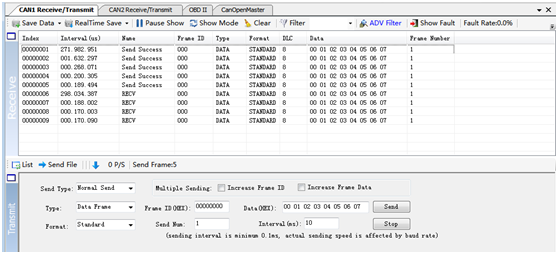
이러한 기본 기능을 기대하면 소프트웨어에 문서 전송 기능이 있습니다.
일반 전송: 버스 노드에 문서 전송, CAN-Bus 프로그래밍을 다음과 같이 개발할 수 있습니다.
소프트웨어를 다운로드합니다.
배치 파일 전송: 예약된 배치 파일은 예약된 순서대로 CAN-Bus로 재전송하고
데이터.
4.3 CAN-Bus 진단 기능
CAN-Bus 진단 기능은 버스 에러 프레임과 버스 중재 실패를 감지할 수 있습니다.

CAN 버스 상태 표시: CAN 버스 상태 표시: 버스 정상, 수동 오류, 능동 오류, 버스 꺼짐 등 CAN 버스 상태를 표시합니다.
CAN 컨트롤러 FIFO 오버플로: 메시지가 너무 밀집되어 일정 시간 내에 데이터가 손실되는 경우입니다.
CAN 컨트롤러 오류 알람: 버스에서 많은 오류가 발생하면 오류 카운터가 초과합니다.
알람 임계값을 설정하고 오류 횟수를 표시합니다.
CAN 컨트롤러 부정적 오류: 많은 송신 또는 수신 오류가 발생하면 다음과 같이 이어집니다.
CAN 컨트롤러를 음수 상태로 전환하고 오류를 표시합니다.
카운트.
CAN 컨트롤러 중재 실패: 이 노드가 다른 노드와 CAN-Bus를 경쟁하지 못했을 때
장비, 다음 번에 무장 메시지를 보내려고 할 것입니다.
해당 오류 정보를 잡아 표시합니다.
CAN 컨트롤러 오류: CAN-Bus 송수신 오류 발생 시 오류 카운터 값이 누적되어 ACK, CRC 오류 등과 같은 잘못된 정보를 포착할 수 있습니다.
CAN 데이터 버퍼 오버플로: 일정 시간 동안 계산할 데이터를 교환하지 않으면 저장 메시지 수가 펌웨어 용량 제한을 초과하고 새로 수신된 메시지가 가장 앞선 메시지를 덮게 됩니다.
4.4 릴레이 기능 및 오프라인 기능
CANBus-II Pro 릴레이 기능은 동일하거나 다른 CAN 버스 데이터를 서로 전송할 수 있으며, 컴퓨터를 통해 데이터 흐름을 확인할 수 있습니다.
오프라인 모드를 구성하면 사용자는 메모장 (. TXT) 지침을 사용하여 CAN 장치에서 다운로드 한 후 메모장의 지침, 오프라인 지침에 따라 오프라인 모드에서 작동 할 수 있습니다 : 보내기, 시간 지연 및 전송 트리거, 수정 된 보내기 일반적으로 사용되는 기능을 수신합니다.
4.5 기타 기능
데이터 저장/실시간 저장
디스플레이 일시 중지
디스플레이 모드
데이터 지우기
필터 설정
고급 마스크
오류 마을 표시
OBDII 플러그인
CANopen 메인 스테이션
주의: 사용자는 ECANTools에서 더 많은 기능을 찾을 수 있습니다.
5. 2차 개발
표준 인터페이스 함수 라이브러리를 제공합니다: ECANVCI.h、ECANVCI.lib、ECANVCI.dll.