4. 구성 지침
4.1 준비할 구성
컨버터의 셸을 열고 아래 표시된 DIP 스위치를 찾아 스위치 2를 "켜기"로 돌린 다음 전원 공급 장치에 연결하면 구성 모드로 들어갈 수 있습니다.
참고: GCAN-204는 RS485 인터페이스를 사용하여 구성하며, "미니 USB" 인터페이스는 연결하지 마세요.

4.2 소프트웨어 연결
GCAN-204가 구성 모드로 들어가면 RS485 회선을 사용하여 PC에 연결합니다. "ModbusRTU CAN Config" 소프트웨어를 연 다음 파라미터를 구성합니다. 소프트웨어 인터페이스는 그림 4.1에 나와 있습니다.

일련번호를 선택하고 "연결"을 클릭합니다. 연결을 설정한 후 "读参数 업로드"를 클릭하여 그림 4와 같이 현재 구성 매개변수를 읽습니다.
참고: 이 시점에서 변환기가 PC와 연결되었으므로 '연결'을 반복해서 클릭하지 마세요.

4.3 매개변수 구성
"커뮤니케이션 세트"를 클릭합니다.
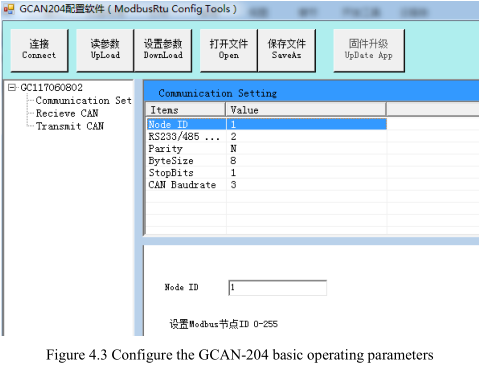
이 인터페이스에서 설정할 수 있습니다:
노드 ID: 모드버스 노드의 ID입니다.
패리티: 홀수 패리티 또는 짝수 패리티
바이트 크기: 데이터의 길이
비트 중지: 비트 수 중지: 비트 수 중지
RS232 / 485 전송 속도: 모드버스 RTU 전송 속도
CAN 전송 속도: CAN-Bus 전송 속도
공장 설정: 모드버스 RTU 측 전송 속도는 57600bps, CAN 전송 속도는 250Kbps입니다.
4.4 매핑 테이블 구성
"추가"를 눌러 데이터를 추가합니다. "수신 CAN" 모드버스 주소: 0x00-0x7F, 송신 CAN의 모드버스 주소: 0x100-0x17F.
4.4.1 CAN 수신
그림 4.4와 같이 "수신 CAN"을 클릭합니다.
COB-ID: CAN-Bus의 프레임 ID를 설정합니다.
프레임 포맷: 프레임 형식(표준/확장)을 설정합니다.
프레임 유형: 프레임 유형(데이터/RTR)을 설정합니다.
모드버스 주소: 모드버스 레지스터 첫 번째 주소 설정
길이: CAN 프레임 데이터 길이, 최대값 8
4.4.2 CAN 전송
그림 4와 같이 'CAN 전송'을 클릭하여 데이터 매핑 그룹을 추가합니다. 5.
COB-ID: CAN-Bus 데이터로 전달할 프레임 ID를 설정합니다.
프레임 포맷: 프레임 형식(표준/확장)을 설정합니다.
프레임 유형: 프레임 유형(데이터/RTR)을 설정합니다.
모드버스 주소: 모드버스 터미널 레지스터의 첫 번째 주소를 설정합니다.
길이: CAN 프레임 데이터 길이, 최대값은 8입니다.
'추적' 또는 '타이머'를 설정합니다.
Trace: 모드버스 마스터가 06 명령어와 함께 모드버스 주소 데이터를 전송할 때 다음과 같은 경우
데이터가 변경되면 해당 CAN 데이터 전송을 트리거합니다.
타이머: 간격 시간을 설정하고 CAN 데이터를 주기적으로 전송할 수 있습니다. 간격을 설정하는 단위는
를 클릭한 다음 "보내기 타이머"를 클릭하고 소수를 입력합니다. 단위는 밀리초입니다. For
예를 들어 "enter 1000"은 1000ms 간격으로 전송할 수 있습니다.
4.5 매개변수 다운로드
구성이 완료되면 "설정 값 다운로드"를 클릭하고 구성 데이터를 변환기의 "플래시"에 다운로드합니다. 다운로드 작업이 실패하면 다시 다운로드하세요.
참고: 데이터가 성공적으로 다운로드된 후 2번 DIP 스위치를 "OFF"로 설정한 다음 변환기를 다시 시작해야 새 구성을 활성화할 수 있습니다.

4.6 매개변수 저장
구성을 저장하고 '다른 이름으로 저장'을 클릭하여 파라미터를 PC에 저장합니다. 그러면 파일을 여러 번 사용할 수 있습니다.