CAN FD가 도입됨에 따라 차세대 CANopen 표준인 CANopen FD의 역할이 점점 더 중요해질 수 있다는 점에 주목할 필요가 있습니다.
CAN 버스 및 J1939 프로토콜과 비교하여 CANopen 프로토콜은 다음과 같은 6가지 핵심 개념을 추가합니다:
디바이스/노드 통신에는 마스터/슬레이브, 클라이언트/서버, 생산자/소비자의 3가지 모드가 있습니다.
노드 구성(SDO) 또는 실시간 데이터 전송(PDO) 등 통신에 사용되는 프로토콜입니다.
하나의 디바이스가 다양한 상태를 지원합니다. '마스터' 노드는 재설정과 같은 작업을 포함하여 '슬레이브' 노드를 변경할 수 있습니다.
각 장치에는 장치 구성 등을 지정하는 항목이 있는 OD가 있으며, SDO를 통해 액세스할 수 있습니다.
EDS는 OD 항목에 대한 표준 파일 형식으로, 서비스 도구에서 장치를 업데이트할 수 있습니다.
I/O 모듈(CiA 401) 및 모션 제어(CiA 402)와 같은 공급업체 독립성에 대해 설명합니다.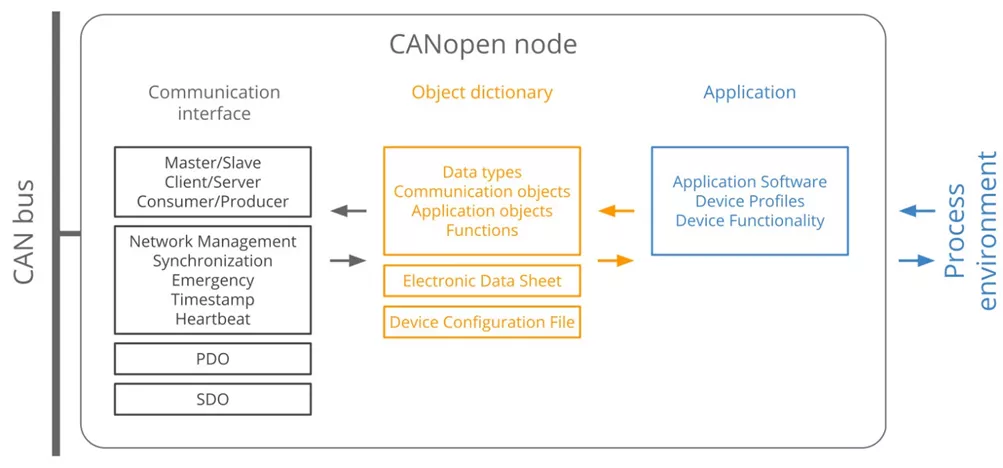
예를 들어 산업 자동화 설정에서 여러 서보 모터 노드와 제어 인터페이스/PC 노드가 있는 로봇 팔이 있는 경우와 같이 CANopen 네트워크에서는 여러 장치가 통신해야 합니다. 통신을 용이하게 하기 위해 CANopen에는 세 가지 모드가 있으며, 각 모드는 우리가 논의 중인 CANopen 프로토콜과 밀접하게 연결되어 있습니다. 아래에 세 가지 모드에 대해 간략하게 설명합니다:
하나의 노드(예: 제어 인터페이스)가 애플리케이션 마스터 또는 마스터 컨트롤러 역할을 합니다. 서보 모터와 같은 슬레이브 장치에서 데이터를 요청합니다. 이 프로세스는 진단 또는 상태 관리에 사용됩니다. 표준 애플리케이션에서는 0~127개의 슬레이브를 사용할 수 있습니다. 참고: 단일 CANopen 네트워크에서 동일한 데이터 링크 계층을 공유하는 여러 호스트 컨트롤러가 있을 수 있습니다.서비스 예시: NMT
클라이언트가 서버에 데이터 요청을 보내면 서버가 요청된 데이터로 응답합니다. 예를 들어 애플리케이션 마스터가 슬레이브의 OD에서 데이터를 가져와야 할 때 이 모드를 사용합니다. 서버에서 읽는 것은 '업로드'이고 '쓰기'는 '다운로드'입니다(이 용어는 서버 측의 관점에서 가져온 것입니다).서비스 예시: SDO
이 모드에서는 생산자 노드가 네트워크에 데이터를 브로드캐스트하고 소비자 노드가 이를 소비합니다. 제작자는 요청 시(풀 모델) 또는 특정 요청 없이(푸시 모델) 이 데이터를 전송합니다.서비스 예시: 하트비트