CANopen은 기본적으로 CAN 버스에서 데이터를 전송할 때 사용되는 통신 언어로 정의할 수 있습니다. 송신자와 수신자의 데이터 정보 정의는 공통 표준을 따라야 합니다.
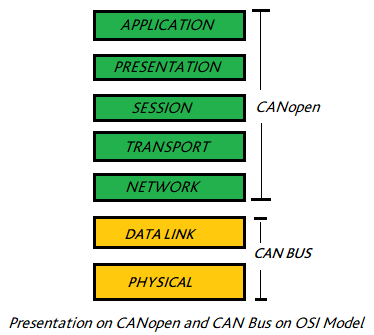
물리 계층과 데이터 링크 계층을 포함하는 CAN 버스 기반 프로토콜과 비교하면, CANopen은 네트워크 계층, 전송 계층, 세션 계층, 프레젠테이션 계층, 애플리케이션 계층의 5가지 계층을 포함하는 상위 레벨 프로토콜입니다.
CAN 버스에서 이러한 프로토콜의 기능은 다음과 같이 설명됩니다:
| 계층적 정의 | 기능 |
| 네트워크 계층 | 라우팅 및 주소 지정 |
| 전송 계층 | 안정적인 엔드투엔드 전송 |
| 세션 레이어 | 동기화 |
| 프레젠테이션 레이어 | 인코딩 및 표현 |
| 애플리케이션 계층 | 구성, 전송 및 동기화 방법을 설명합니다. |
| CANopen 장치 |
CAN 버스는 많은 산업 분야에서 성공적으로 적용되어 왔지만, CANopen은 더 많은 분야에 적용될 수 있도록 설계되었습니다. 원래 모션 지향 기계 제어 시스템을 위해 설계된 CANopen은 현재 다음과 같은 다양한 분야에서 사용되고 있습니다:
● 로봇 공학
의료 장비
스테퍼 및 서보 모터
식품 가공
자동화
CANopen의 내부 디바이스 구조는 크게 세 가지 논리적 부분으로 구성됩니다:
| 프로토콜 스택 | CAN n/w를 통한 통신 처리 |
| 애플리케이션 | ● 내부 통제 기능 지원
하드웨어용 인터페이스 제공 |
| 개체 사전 | CANopen 디바이스의 구성 및 진단이 가장 중요합니다.
● 인터페이스 프로토콜 및 애플리케이션 소프트웨어 모든 사용 데이터 유형에 적용 모든 통신 매개변수 및 애플리케이션 매개변수 저장 |
CANopen 메시지 프레임 포맷: CANopen의 메시지 프레임 형식은 CAN 버스와 유사합니다. 여기에는 CAN 버스와의 COB-ID 충돌을 피하기 위해 COB-ID 및 제어 비트가 포함되어 있습니다.
COB-ID는 모두 다릅니다.

찾고 계십니까? PLC I/O 커플러? 자세히 알아보려면 클릭하세요!