3. 사용 중인 어댑터
3.1 수정 시스템 시간
GCAN-401에는 통합 시스템 시계, 시스템 시계 및 파일 시스템이 날짜별로 데이터를 기록할 수 있습니다.
GCAN-401은 매일 날짜별로 폴더를 생성합니다. 버스 데이터는 해당 폴더에 자동으로 저장됩니다.
GCAN-401은 분당 새 파일을 생성하며, 데이터는 해당 파일에 저장됩니다.
GCAN-401 어댑터의 시스템 시계가 사용 전에 실제와 다른 경우, 사용자는 다음 방법으로 직접 시간을 조정할 수 있습니다.
1. USB 케이블을 사용하여 GCAN-401과 PC를 연결합니다(그림 3.2의 USB 포트).
2. 2. 직렬 디버깅 도우미를 사용하여 어댑터에 시간을 보냅니다.
(직렬 포트 전송 속도: 115200, 데이터 비트: 8, 스톱 비트: 1, 패리티 비트 없음, 명령어: "NT = XXX". 예: "NT = 20170329215500"를 보내면 시스템 시간이 2017년 3월 29일 21:55:00으로 수정됩니다. ASCII로 송수신하고 "새 줄 보내기"를 선택하고 "16진수"를 선택하지 마세요.)
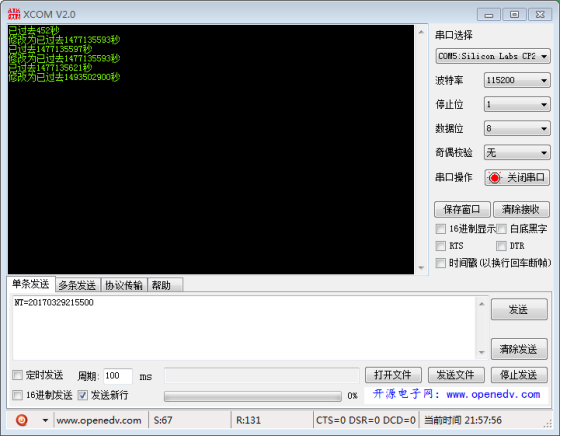
그림 3.1 GCAN-401 보정 시스템 시간 인터페이스
3.2 CAN 버스 구성
GCAN-401 어댑터는 일반적으로 사용자가 사용하기 전에 실제 수요에 따라 CAN-Bus 통신 매개변수를 설정해야 합니다.
3.2.1 CAN 버스 전송 속도 구성
GCAN-401은 일반적으로 사용되는 10K~1000K 사이의 전송 속도를 지원할 수 있습니다. 전송 속도는 그림 3.2와 같이 코드 스위치 위치인 코드 스위치로 설정할 수 있습니다.

그림 3.2 GCAN-401 프로파일
코드 스위치 "1, 2, 3, 4"는 CAN-Bus 전송 속도를 설정할 수 있으며, 다른 스위치(5, 6, 8)는 특별한 정의가 있으며 기본값은 아래로 설정되어 있으므로 임의로 설정하지 마세요. 코드 스위치를 아래로 누르면 기본값은 0이며, 표 3.1에 표시된 대로 각 전송 속도를 설정합니다.
참고: 전송 속도를 수정하려면 전원을 꺼야 합니다.

표 3.1 GCAN-401 전송 속도 구성 차트
3.2.2 CAN-Bus 단자 저항 구성
GCAN-401은 내부 120Ω 터미널 저항이 통합되어 있어 사용자가 코드 스위치 다이얼을 통한 액세스 여부를 선택할 수 있습니다.
3.3 CAN에 연결
CANCOM 어댑터는 2.2장, CAN_H에서 CAN_H로, CAN_L에서 CAN_L로 CAN-Bus에 연결합니다.
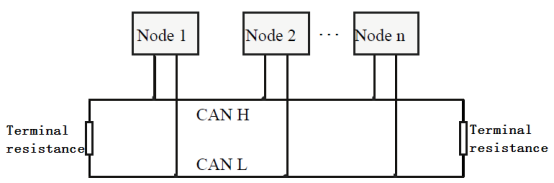
CAN 버스 네트워크는 토폴로지 구조를 채택하고 있으며, 가장 먼 두 개의 터미널만 CAN_H와 CAN_L 사이에 120Ω 터미널 저항을 연결하면 됩니다. 분기 연결의 경우, 그 길이는 3m를 넘지 않아야 합니다. 그림 3.1과 같이 CAN-bus 노드를 연결합니다.
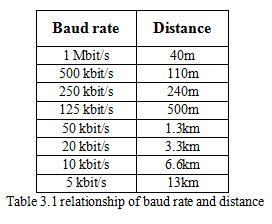
참고: CAN-버스 케이블은 일반 트위스트 페어 케이블, 차폐 트위스트 페어 케이블을 사용할 수 있습니다. 최대 통신 거리의 이론은 버스 전송 속도에 따라 달라지며, 표 3.1에 나와 있는 것처럼 이들의 관계는 다음과 같습니다.
3.4 CAN-Bus 단자 저항
통신 안정성을 향상시키고 CAN 버스 터미널 반사를 제거하기 위해 가장 먼 두 터미널은 그림 3.2와 같이 CAN_H와 CAN_L 사이에 터미널 저항을 연결해야 합니다. 단자 저항 값은 케이블의 특성 임피던스에 의해 결정됩니다. 예를 들어, 특성 임피던스는 120Ω입니다.
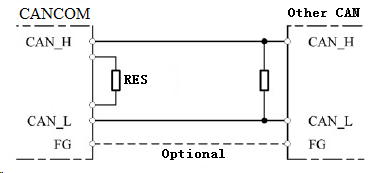
참고: CANCOM 어댑터는 120Ω 단자 저항이 통합되어 있지 않으므로 필요한 경우 사용자가 직접 연결해야 합니다.
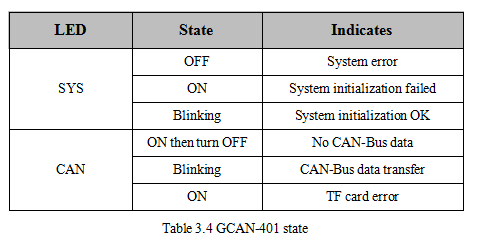
3.5 시스템 LED
어댑터 상태를 표시하는 SYS 표시등 1개, CAN 표시등 1개가 있는 GCAN-401 어댑터. 더 많은 기능은 표 3.3 및 3.4에 나와 있습니다.
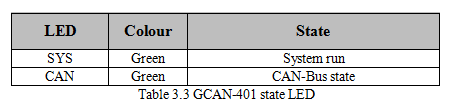
GCAN-401 어댑터 전원이 켜지고 SYS LED가 깜박이면 어댑터에 전원이 공급되고 시스템이 초기화되었음을 나타내며, 그렇지 않으면 시스템 정전 또는 시스템 오류가 발생한 것입니다.
전원을 켜면 CAN LED가 켜지면 TF 카드 오류를 나타냅니다.
CAN LED가 켜졌다가 꺼지면 TF 카드가 정상적으로 작동함을 나타냅니다.
어댑터가 데이터를 수신하면 CAN LED가 깜박입니다.