Description
L'adaptateur USBCAN-Mini est un outil de débogage ou d'analyse avec un canal CAN-Bus.
Cet adaptateur est conçu pour une utilisation portable. Grâce à cet adaptateur, le PC peut facilement se connecter au réseau CAN-Bus via l'interface USB et devenir un nœud intelligent du CAN-Bus pour transmettre/recevoir des données CAN-Bus.
L'adaptateur est fourni avec une isolation et peut être utilisé dans différents systèmes Windows/Linux.
Il existe des pilotes de périphériques, des logiciels et des interfaces de programmation (VC, VB, Net, Delphi, Labview, C++Builder) pour différents systèmes d'exploitation, de sorte que les programmes peuvent facilement accéder à un bus CAN connecté.
| Physique |
|
| Taille (LxLxH) |
55*35*14 |
|
| Fil de fer |
0.9m |
|
| Formulaire d'interface |
-40°C~85°C |
|
| Le matériau de la coque |
Plastiques techniques |
|
| Numéro du canal CAN |
unique |
|
| Électricité |
|
| Alimentation en tension |
Alimentation USB |
|
| Tension de fonctionnement |
5V |
|
| Tension d'isolement |
Isolation magnétique de 1500V |
|
| Système |
|
| Système de soutien |
Windows 2000/2003 XP /7/8/10/ Par exemple |
|
| environnement de développement |
VC VB C C+ C++ C++Builder NET Labwindows Delphi LabVIEW |
|
| Caractéristiques du bus CAN |
|
| Vitesse de transmission |
5Kbps--1Mbps |
|
| Vitesse de transfert |
Envoi jusqu'à 8000 images/s et réception jusqu'à 14000 images/s |
|
| Norme d'exécution |
Support CAN 2.0A CAN2.0B ISO/DIS 1188-1/2/3 |
|
| Caractéristiques du bus USB |
|
| Norme d'exécution |
Compatible avec USB2.0 full speed Compatible avec USB1.1 Support USB3.0 |
|
Fonctions
1. fonction de reconnaissance automatique de la vitesse de transmission
Il peut identifier automatiquement la vitesse de transmission d'un bus dont la vitesse de transmission est inconnue. Tant qu'il s'agit d'un bus CAN actif, l'équipement de notre société peut identifier sa vitesse de transmission. Il existe deux façons d'identifier la vitesse de transmission :
A : Reconnaissance de la vitesse de transmission standard (1000K, 500K, 250K...)
B : Reconnaissance du débit en bauds sur toute la plage (définir la plage de début et de fin, scanner le débit en bauds dans la plage).
Cette fonction permet d'envoyer et de recevoir des données après avoir identifié les dispositifs dont la vitesse de transmission est inconnue. Elle peut également être utilisée pour tester la vitesse de transmission des nouveaux dispositifs de communication CAN.

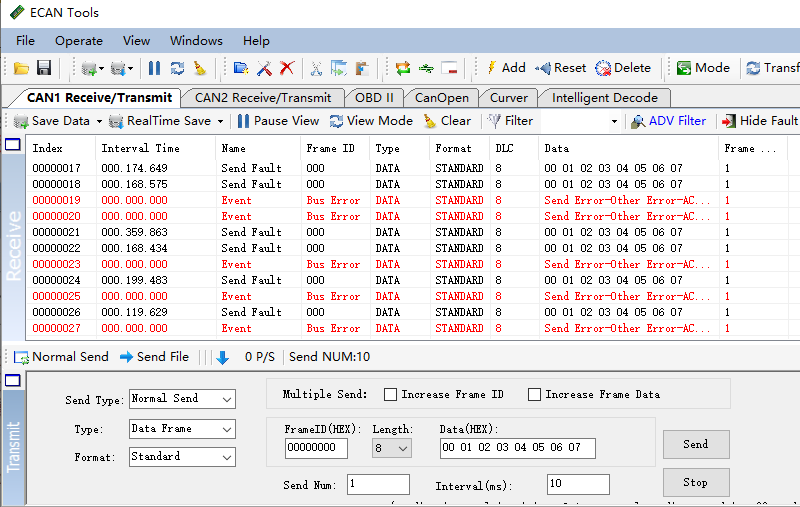
2.Fonction de base de l'émetteur-récepteur de données CAN
Le logiciel peut envoyer et recevoir des données standard du bus CAN, prendre en charge l'envoi et la réception des formats de trame CAN2.0A et CAN2.0B, prendre en charge l'envoi et la réception des trames de données et des trames distantes. La liste de réception du logiciel peut recevoir jusqu'à 1 million de trames de données, et la liste de réception peut être enregistrée localement dans 3 formats : fichier texte (.TXT), fichier batch (.CAN), fichier excel (.csv), cette fonction est pratique L'utilisateur effectue le stockage des données et l'analyse du traitement, et le fichier batch peut être renvoyé au bus CAN via le logiciel.
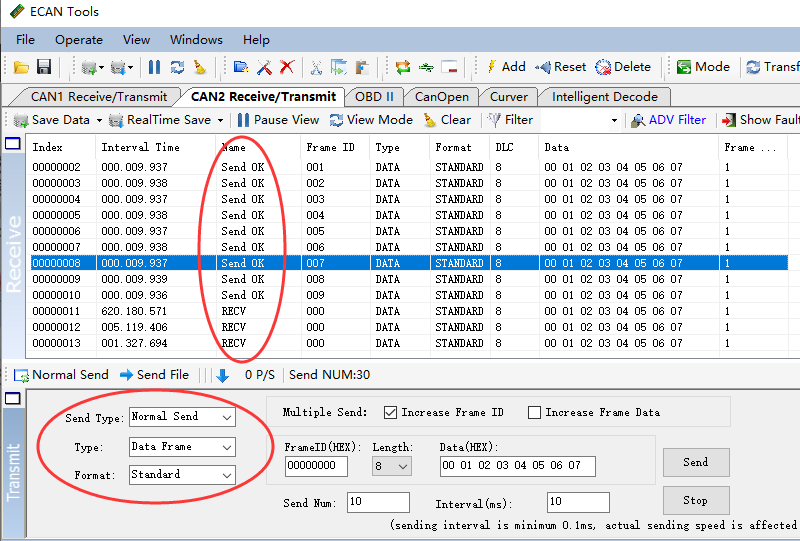
3.Fonction avancée de transmission des données du bus CAN
Lors de l'envoi de données, vous pouvez définir le mode d'envoi normal et le mode d'envoi par liste. Le mode liste permet d'éditer plusieurs données CAN. Les données CAN de la liste d'envoi peuvent être envoyées simultanément et de manière cyclique, et la liste d'envoi peut être enregistrée/chargée.
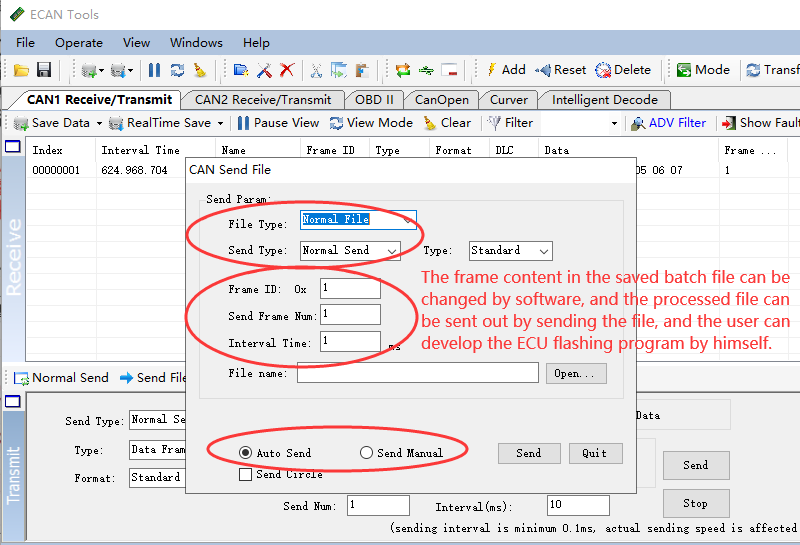
La fonction d'envoi de fichier peut renvoyer le fichier de lot (.CAN) au bus CAN en fonction des informations de séquence temporelle lors de la réception. Le fichier de lot peut être édité à l'aide du bloc-notes, et le fichier édité peut être envoyé en fonction du contenu réellement écrit par l'utilisateur.
Cette fonction peut être utilisée comme simulateur de signal pour les utilisateurs d'électronique automobile. Par exemple, le système de navigation de la voiture est contrôlé par le signal CAN pour s'activer. L'utilisateur peut intercepter un morceau de données contenant le signal de démarrage de la navigation automobile sans avoir à trouver le signal de démarrage à partir de ces données. Après avoir retiré le système de navigation de la voiture, il peut renvoyer cet élément de données au système de navigation pour le démarrer sans l'ECU.
4. recevoir des statistiques en temps réel
La fonction de statistiques de réception permet de compter en temps réel les données reçues selon les règles correspondantes. Les règles statistiques comprennent : le nom de la trame, l'ID de la trame, le format de la trame, le type de trame et les données de la trame. Une fois les règles de classification définies, lorsque les données reçues répondent aux règles de classification, le logiciel fusionne automatiquement les données qui répondent aux règles et compte la quantité fusionnée. Cette fonction est très utile lorsque la quantité de données sur le bus est importante. Une fois la même image combinée, il est plus facile d'observer et d'analyser d'autres données.
Il existe de nombreux nœuds sur le bus CAN automobile qui envoient périodiquement les mêmes données au bus pour communiquer avec l'ECU. Et ces mêmes données éblouissent souvent les analystes de données et perturbent l'analyse d'autres données utiles sur le bus. Une utilisation flexible de la fonction de réception des statistiques permet de combiner les données envoyées de manière répétée dans une boucle. À ce moment-là, s'il y a de nouvelles données sur le bus, les données sont envoyées et vous pouvez les voir intuitivement.

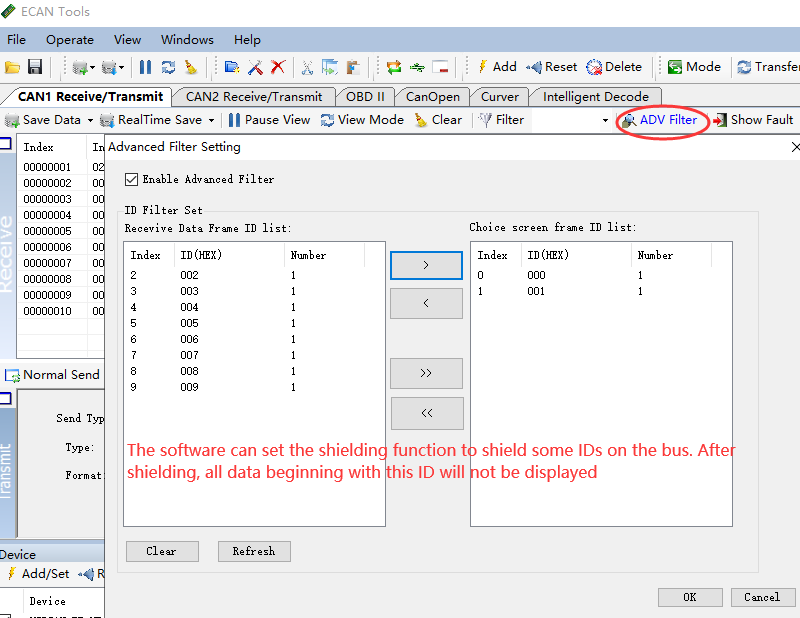
5.Fonction de filtrage multi-segment des données
Le logiciel peut définir le filtre de réception et vous pouvez spécifier l'affichage des données commençant par certains ID de trame en définissant la liste des filtres de réception. En définissant la plage du filtre d'ID de trame, les données d'ID de trame dans la plage d'affichage sont atteintes, et les données en dehors de la plage sont protégées. Il est possible d'ajouter plusieurs plages d'ID de trame à la liste de filtrage et de définir des trames standard et des trames étendues. Cette fonction est très pratique pour filtrer les données indésirables et faciliter l'analyse des données.
Cette fonction permet de filtrer les ID de trame que l'on ne souhaite pas voir. Si l'utilisateur n'est intéressé que par les données envoyées par un certain ID de trame, les données peuvent être affichées de manière intuitive en définissant la méthode de filtrage.

6.Données fonction de blindage intelligent
Le logiciel peut être configuré pour recevoir un blindage, et les données de l'ID spécifié ne peuvent pas être affichées en sélectionnant l'ID de trame qui doit être blindé. Une fois que le logiciel a reçu les données, entrez dans l'interface de réglage du masque pour afficher l'ID de trame des données actuellement reçues. En ajoutant la liste des masques, les données commençant par l'ID de trame spécifié seront masquées, et l'ID de trame ne sera plus affiché dans le futur. Cette fonction est pratique pour masquer les données que vous ne voulez pas voir et pour l'analyse des données.
Cette fonction est tout à fait adaptée aux systèmes à fort trafic de données tels que le bus CAN des automobiles. La conférence sur le volume de données a ébloui les analystes, mais en fait, ils ne se soucient pas d'une grande quantité de données. L'utilisation flexible de la fonction de blindage peut réduire considérablement la charge de travail des analystes. Les utilisateurs peuvent masquer les données qui ne les intéressent pas lors de l'observation des données, ce qui est pratique pour le traitement ultérieur des données.
7.Fonction de réception des trames d'erreur
Le logiciel peut recevoir des trames d'erreur sur le bus. Lorsqu'une trame d'erreur est générée sur le bus, elle provoque des interférences sur le bus et, dans les cas les plus graves, le bus est complètement paralysé. Le logiciel ECAN Tools peut recevoir le type et l'état de la trame d'erreur afin que l'utilisateur puisse trouver à temps le nœud défectueux dans la communication du bus et le réparer ou le remplacer à temps.
La fonction esclave peut trouver le dispositif qui envoie la trame d'erreur pour la réparer ou la remplacer en déconnectant tous les nœuds du bus à tour de rôle.
8. fonction de transfert de données (seul l'USBCAN-II Pro peut être utilisé)
La fonction de transfert de données permet de renvoyer les données CAN reçues par un certain canal vers le bus actuel ou via un autre canal. La fonction de transfert prend en charge le filtrage des données. Les utilisateurs peuvent utiliser la fonction de filtrage avec la fonction de transfert de manière très flexible. En tant que passerelle reliant deux bus CAN, il ne transmet que les données souhaitées.
Application typique :
R : L'apprentissage du bus CAN et les développeurs d'appareils peuvent utiliser cette fonction pour transmettre les données envoyées par l'appareil lui-même via USBCAN et les recevoir, afin de juger si les fonctions d'envoi et de réception de l'appareil sont normales et si les données sont correctes.
B : Les utilisateurs de systèmes électroniques de développement et de diagnostic automobile peuvent utiliser cette fonction pour filtrer les données souhaitées et les envoyer par un autre canal, qui peut être utilisé pour masquer certaines données non pertinentes.

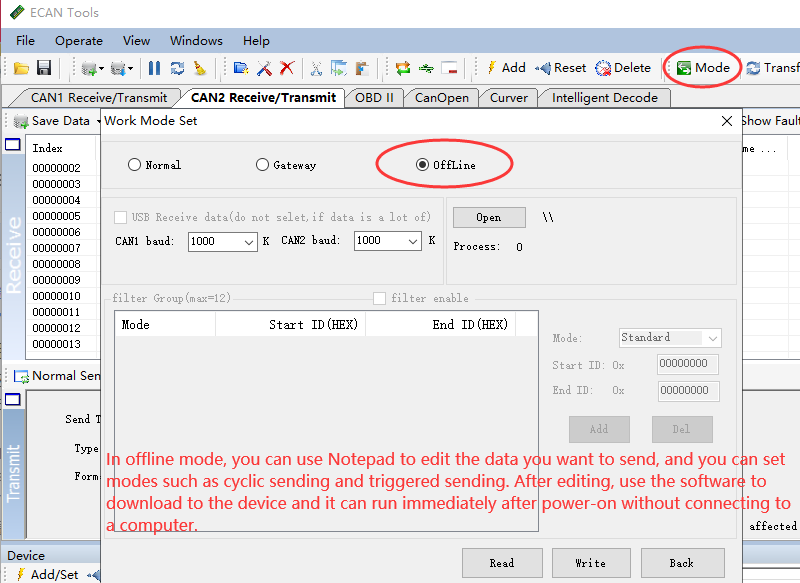
9. fonction d'utilisation hors ligne (seul l'USBCAN-II Pro peut être utilisé)
En mode hors ligne intelligent, les utilisateurs peuvent éditer des instructions avec le bloc-notes (.txt) et les télécharger sur l'appareil CAN. Une fois que l'appareil CAN téléchargé est mis sous tension, il peut fonctionner hors ligne conformément aux instructions du bloc-notes. Les instructions hors ligne sont disponibles : les fonctions communes telles que l'envoi, la temporisation, le déclenchement de l'envoi, la réception et l'envoi après modification, permettent aux utilisateurs de réaliser facilement un contrôle automatique hors ligne, même s'ils ne développent pas deux fois le logiciel. Les données peuvent être envoyées automatiquement après la mise sous tension. Cette fonction peut être utilisée pour tester la ligne de production, simuler des données de protocole après avoir craqué le protocole, etc. Elle offre un large éventail d'utilisations.
Application typique :
R : Les données envoyées par can1 ou can2 peuvent être définies arbitrairement.
B : Vous pouvez modifier la commande du bus CAN pour envoyer des données. Cette fonction ne nécessite pas de développeur professionnel. Il vous suffit d'utiliser un simple bloc-notes pour modifier un élément de logique afin d'envoyer des données dans le cadre d'un développement secondaire.
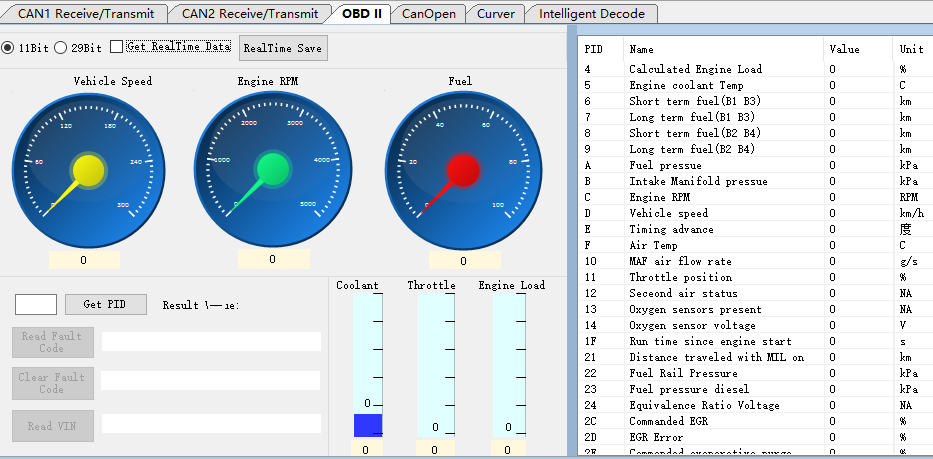
10.décodage du protocole standard automobile (USBCAN-II C non pris en charge)
Cette fonction peut être utilisée pour analyser les données du protocole standard ISO15765 des véhicules à essence. Les utilisateurs n'ont qu'à connecter le dispositif USBCAN au bus CAN de la voiture (les modèles dotés d'une passerelle doivent contourner cette dernière) pour obtenir un certain nombre de données standard et les analyser : Vitesse du véhicule, vitesse de rotation, température de l'eau, tension, quantité de carburant, position de la pédale d'accélérateur, ouverture du papillon, etc. La quantité de données pouvant être analysées dépend du degré de développement de l'usine automobile.
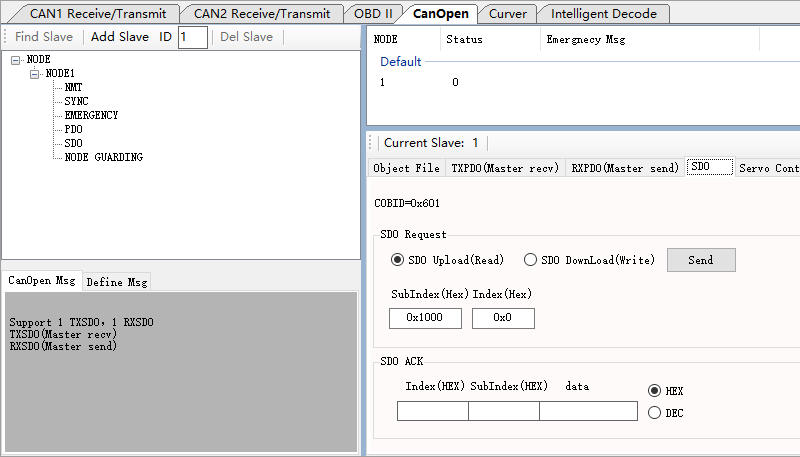
11. maître CANopen (USBCAN-II C non pris en charge)
Cette fonction permet de transformer l'analyseur USBCAN en un dispositif maître CANopen standard et de le connecter au réseau CANopen. Le dispositif maître CANopen peut effectuer des opérations d'instruction de base telles que NMT, PDO et SDO sur les dispositifs esclaves du système, tels que CANopen. Les utilisateurs peuvent utiliser l'analyseur USBCAN pour déboguer et analyser les dispositifs esclaves CANopen tels que les servomoteurs, les encodeurs, les automates programmables, les capteurs, etc.
Fonction du logiciel CAN Test
Fonction d'analyse des fichiers DBC : elle peut être utilisée pour l'analyse du protocole BMS de la pile de charge, l'analyse du protocole CAN J1939 du véhicule, l'essai et l'entretien du véhicule, le craquage des données du véhicule, etc.
Fonction de statistiques du flux de bus : le logiciel peut compter le flux de données du bus en temps réel et l'afficher sous forme de dessin.
Fonction d'envoi de données selon une séquence temporelle : les données de la liste peuvent être envoyées selon la séquence, et la liste d'envoi peut traiter 100 éléments. Cette fonction est pratique pour le débogage du protocole qui doit envoyer les données selon la séquence.
Fonction d'enregistrement des fichiers : les données de la liste de réception peuvent être enregistrées localement et sont compatibles avec les formats texte (.txt) et Excel (.csv).
Fonction de changement de langue : le logiciel prend en charge le chinois et l'anglais.
Présentation des fonctions du logiciel d'analyse du protocole CAN Pro
Analyse des données du protocole de la couche supérieure du bus CAN : Il peut analyser les protocoles standard de la couche supérieure du bus CAN, y compris : DeviceNet, SAE J1939, CANOpen, ICAN, etc.
Analyse personnalisée des protocoles : Les utilisateurs peuvent utiliser des scripts pour définir leurs propres protocoles. Une fois le protocole personnalisé programmé dans le logiciel conformément aux règles, lorsque les données reçues sont conformes au protocole, le logiciel les analyse automatiquement en fonction de l'édition de l'utilisateur.
Fonction de déclenchement : L'utilisateur peut prédéfinir la condition de déclenchement et les données ou fichiers à envoyer. Une fois le réglage du déclencheur activé, la fonction de déclenchement est activée lorsque des données répondant aux conditions sont reçues. La fonction de déclenchement peut mettre l'affichage en pause, envoyer des données et des fichiers. Cette fonction peut être utilisée pour le positionnement et la détection de messages spéciaux.
Lecture des données, fonction de lecture hors ligne : Cette fonction permet de charger le fichier de lot (.CAN) enregistré par le logiciel CAN Pro dans la liste d'envoi, et les données du fichier peuvent être renvoyées sur le bus CAN en fonction de la séquence temporelle lors de l'enregistrement.
Fonction d'extraction des quantités physiques et d'affichage graphique : Une fois que le logiciel a chargé le fichier DBC, il peut afficher les changements de données en temps réel au moyen de graphiques, de courbes, etc. L'utilisateur peut analyser les données en observant la courbe ou le graphique. L'utilisateur peut analyser les données en observant la courbe ou le graphique. Le logiciel peut également prendre en charge le chargement de protocoles personnalisés, et des graphiques et des courbes peuvent être tracés après le chargement de protocoles définis par l'utilisateur.
Développement secondaire
Tous les types de produits GCAN USBCAN prennent en charge le développement secondaire. Nous fournissons des bibliothèques de liens dynamiques et statiques pour le développement secondaire, ainsi que des routines de développement et des codes sources de routine. Les fonctions de la bibliothèque sont simples et pratiques à utiliser. Les utilisateurs peuvent rapidement appliquer nos dispositifs USBCAN à leur propre projet. Si vous rencontrez des problèmes lors du développement secondaire, nous vous fournirons une assistance technique parfaite ; si l'utilisateur n'a pas la capacité de développement, vous pouvez nous demander de l'OEM ou de la personnalisation.
Nous pouvons fournir des cartes et des coques sans logo, ce qui permet aux utilisateurs de les revendre ou de développer leurs propres programmes. Les équipements sans logo bénéficient également de la garantie et du service après-vente. Nous fournissons un identifiant matériel exclusif, ce qui facilite l'utilisation et la gestion de l'équipement par les utilisateurs, et nous pouvons crypter les logiciels/matériels en lisant l'identifiant matériel, ce qui protège grandement les résultats de développement des utilisateurs. Notre société fournit aux utilisateurs des programmes d'exemple et des codes source en VB, VC, C#, .NET, Labview, labwindows, delphi et autres. Nous fournissons des supports de développement secondaires tels que l'API et le manuel d'appel de fonction.
Caractéristiques
Adaptateur pour connexion USB (USB 1.1, compatible avec USB 2.0) ;
Tension d'alimentation de l'USB ;
Débit en bauds jusqu'à 1 Mbit/s Résolution de l'horodatage 1μs ;
Conforme aux spécifications CAN 2.0A (11-Bit ID) et 2.0B (29-Bit ID) ;
Connexion CAN-Bus via DB9 ;
Contrôleur CAN NXP SJA1000 ;
Émetteur-récepteur CAN NXP PCA82C251 ;
Prise en charge du logiciel ECAN Tools ;
Isolation galvanique sur la connexion CAN jusqu'à 1500 V ;
Plage de température de fonctionnement étendue de -40 à 85 °C ;
Les pilotes de périphériques et les logiciels sont compatibles avec Windows 2000/2003/XP/7/8/10 et Linux ;
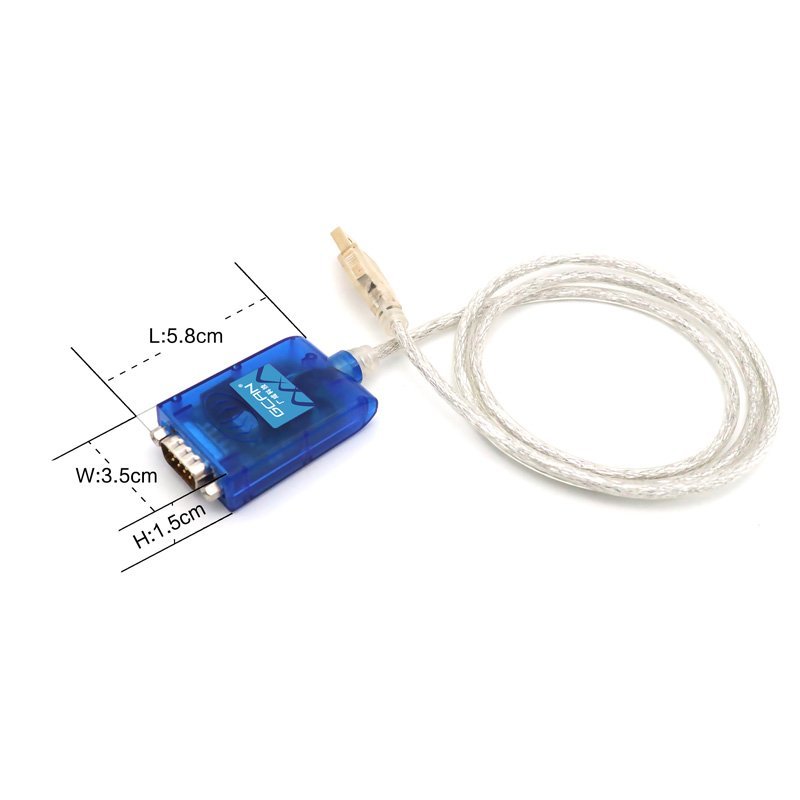
Taille : (L)55mm * (L)35mm * (H)14mm, fil 0.9m.
Notre service
Emballage
1. Emballage standard. Carton
2. Conception personnalisée
Délai de livraison
2~5 jours après réception de votre paiement.
Service après-vente
Service après-vente téléphonique 24 heures sur 24
Support technique
GCAN fournit une garantie après-vente gratuite d'un an, un logiciel gratuit à vie et une assistance technique.
Manuel de l'utilisateur(Cliquez pour voir)
Convertisseur USBCAN-Mini