1. Introduction
1.1 Aperçu fonctionnel
L'enregistreur de données CAN-Bus GCAN-401 est spécialement utilisé pour l'enregistrement hors ligne de données CAN-Bus.
GCAN-401 a intégré une interface CAN-bus. Les utilisateurs peuvent utiliser une carte TF pour enregistrer les données du bus en temps réel.
L'adaptateur GCAN-401 convient à la lecture des données historiques et à l'analyse des messages d'erreur.
1.2 Aperçu des propriétés
Processeur industriel 32 bits à grande vitesse
Utiliser une alimentation externe (DC +9~30V,100mA)
CEM :contact ±2KV,air ±15KV
EFT:±1KV
SURGE:±1KV
Connexion CAN-Bus via OPEH3, PHOENIX ;
Conforme aux spécifications CAN 2.0A (11-Bit ID) et 2.0B (29-Bit ID)
Vitesse de transmission du bus CAN 10Kbps~1Mbps, réglée par le commutateur de code
Isolation galvanique sur la connexion CAN jusqu'à 1500 V
Le trafic de données le plus élevé:14000 fps/s
Résolution de l'horodatage des données CAN 100μs
Plage de température de fonctionnement étendue de -40 à 85 °C
Dimensions : (L) 102 mm * (L) 63mm * (H)23mm
2. L'installation
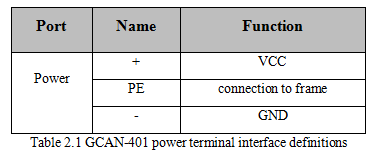
2.1 Alimentation électrique
Le GCAN-401 supporte une large gamme d'alimentation 9~30V, il peut donc être appliqué à la plupart des domaines industriels et à l'intérieur des voitures, les bornes d'alimentation sont définies comme indiqué dans le tableau 2.1.
2.2 Connexion au bus CAN
Le GCAN-401 dispose d'un CAN-Bus avec des fils de connexion de type plug, ce canal CAN-Bus peut être connecté à un réseau CAN-Bus ou à des dispositifs. La définition des broches du terminal est indiquée dans le tableau 2.2.

Note : Dans la pratique, la plupart du temps, il suffit de connecter le CAN_H au CAN_H et le CAN_L au CAN_L pour que la communication soit possible.