1. Introduction
1.1 Vue d'ensemble
Le convertisseur GCAN-204 possède une interface CAN-Bus et une interface série. Le GCAN-204 intègre le protocole Modbus RTU. Avec le GCAN-204, l'utilisateur peut utiliser le bus série pour se connecter à d'autres équipements (avec le protocole Modbus RTU) et accéder à l'interface de communication CAN-Bus.
Le GCAN-204 dispose d'un module de protection d'isolation intégré. La fixation sur rail DIN permet de l'intégrer plus facilement dans l'armoire de commande.
1.2 Propriétés en un coup d'œil
Code de la fonction de prise en charge de l'esclave Modbus : 03H, 04H, 06H, 16H
Vitesse de transmission en série : 600bps ~ 115200bps
Le bus CAN prend en charge les formats de trame CAN2.0A et CAN2.0B, conformément aux normes ISO/DIS 11898.
Taux de bauds CAN : 5Kbps ~ 1Mbps
Tension d'isolation du module d'isolation CAN-Bus : DC 1500V
Alimentation : 9~30V (20mA,24V DC)
Interface à l'aide de borniers
Méthode d'installation : Rail DIN
Plage de température de travail de -40 à 85 °C
Taille : (L)113mm * (L)100mm * (H)21mm
2. L'installation
2.1 Installation et fixation
Le GCAN-204 peut être installé sur un rail DIN, comme le montre la figure 2.1.
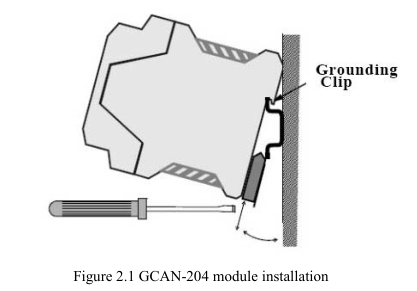
Remarque : les rails DIN doivent être reliés à un fil de terre.
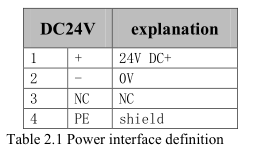
Définition de l'interface d'alimentation du GCAN-204, comme indiqué dans le tableau 2.1.
2.2 Connexion au bus série
L'interface série du GCAN-204 utilise l'interface RS485. Les définitions des broches sont indiquées dans le tableau 2.2.

2.3 Connexion au bus CAN
Les définitions des broches du côté CAN du GCAN-204 sont indiquées dans le tableau 2.3.
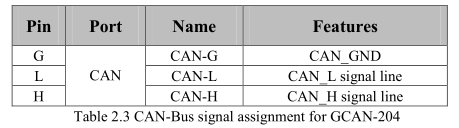
Seuls CAN_H et CAN_H se connectent l'un à l'autre, puis CAN_L et CAN_L se connectent l'un à l'autre. Nous établissons ensuite une connexion.