2 Installation
2.1 Connexion au PC
Le convertisseur peut être connecté directement à un PC à l'aide d'un câble USB vers RS232. Si le PC dispose d'un port RS232, il est également possible d'utiliser directement le port RS232.
2.2 Connexion au bus CAN
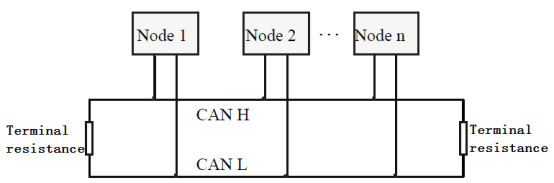
Dans la pratique, il suffit de connecter le CAN_H au CAN_H et le CAN_L au CAN_L pour que la communication soit possible.
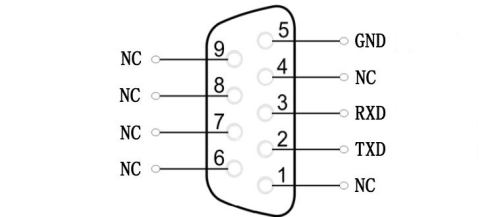
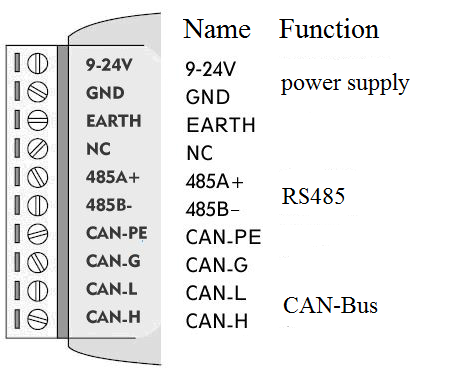
2.3 Définition de l'interface
La définition du port du convertisseur GCAN-207 est illustrée dans les figures 2.1 et 2.2, en utilisant le terminal et le port RS232, pour une application industrielle sur le terrain.
Note : Le réseau CAN-Bus adopte une structure topologique, seules les deux bornes les plus éloignées doivent être connectées à une résistance de 120Ω entre CAN_H et CAN_L. La longueur des branchements ne doit pas dépasser 3 mètres. La connexion des nœuds CAN-Bus est illustrée à la figure 2.3.
2.4 LED du système
Le convertisseur GCAN-207 dispose d'un indicateur PWR, d'un indicateur COM et d'un indicateur CAN pour indiquer l'état du convertisseur. D'autres fonctions sont présentées dans le tableau 2.1.
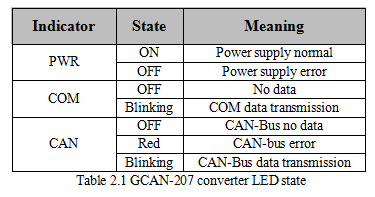
Si le voyant PWR s'allume, cela signifie que vous avez branché le convertisseur GCAN-207 sur une source d'alimentation électrique et que le système est initialisé.
Dans le cas contraire, une panne de courant ou une erreur système s'est produite. Lorsque les données du bus série sont transmises, le voyant COM clignote. Lorsque les données du bus CAN sont transmises, le voyant CAN clignote en vert. En cas d'erreur CAN, le voyant CAN devient rouge. Lorsque les indicateurs COM et CAN clignotent alternativement, cela signifie que le convertisseur est en mode configuration.