4 Connexion au convertisseur
4.1 Alimentation électrique
GCAN-4055 supporte une alimentation +9-30V DC. Nous recommandons d'utiliser une alimentation stabilisée de 12V ou 24V DC.
4.2 Connexion au bus CAN
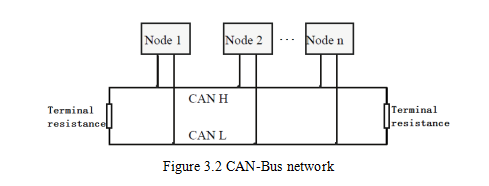
Dans la pratique, il suffit de connecter le CAN_H au CAN_H et le CAN_L au CAN_L pour que la communication soit possible.
Note : Le réseau CAN-Bus adopte une structure topologique, seules les deux bornes les plus éloignées doivent être connectées à une résistance de 120Ω entre CAN_H et CAN_L. Voir la figure 3.2.
4.3 LED du système
Le GCAN-4055 possède un indicateur PWR, un indicateur COM, un indicateur CAN pour indiquer l'état du convertisseur. D'autres fonctions sont présentées dans le tableau 3.2.

5 Exemple d'application
Note : Toutes les stations esclaves de ce chapitre sont réglées sur 1.
Ce chapitre utilise le convertisseur USBCAN-II Pro et le logiciel ECANTools pour recevoir et envoyer des données CAN-Bus.
Vous pouvez l'acheter en utilisant les coordonnées figurant à la dernière page de ce manuel. Vous pouvez connecter le convertisseur USBCAN-II Pro canal CAN1 au canal CAN-Bus du Gcan-4055. Ouvrez ensuite le logiciel ECANTools et sélectionnez la vitesse de transmission correcte.
5.1 Commande de démarrage
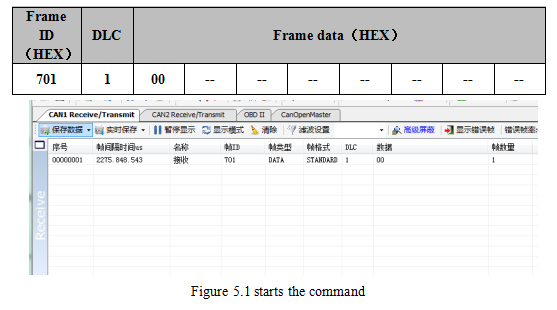
GCAN-4055 enverra une trame à la station maître.
L'ID de la trame est 0x700+Node ID(X). La longueur des données est de 1. Les données de la trame sont 0x00.

Par exemple, le GCAN-4055 envoie automatiquement des données lorsqu'il démarre.
Le convertisseur USBCAN-II Pro peut recevoir ces données et les afficher, comme le montre la figure 5.1.
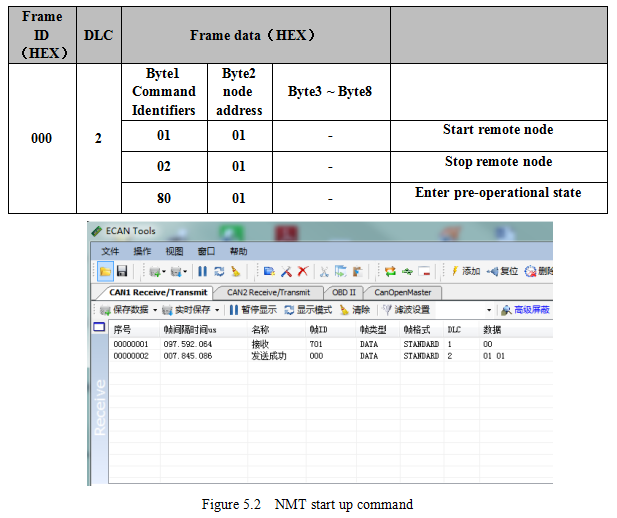
5.2 Commande NMT(Gestion du réseau)
Les utilisateurs peuvent utiliser la commande NMT de la station maître CANopen ou simuler manuellement le protocole CANopen pour contrôler le démarrage ou l'arrêt du GCAN-4055. La simulation manuelle des données du module de démarrage du protocole CANopen est présentée dans le tableau suivant.