CANopen peut être défini en termes simples comme le langage de communication utilisé lors du transfert de données sur le bus CAN. La définition des informations de données par l'émetteur et le récepteur doit suivre une norme commune.
Par rapport au protocole sous-jacent du bus CAN, qui comprend la couche physique et la couche liaison de données, CANopen est un protocole de haut niveau comprenant cinq couches : la couche réseau, la couche transport, la couche session, la couche présentation et la couche application.
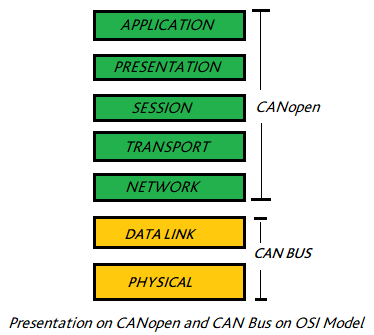
Les fonctions de ces protocoles sur le bus CAN sont décrites ci-dessous :
| Définition hiérarchique | Fonction |
| Couche réseau | Routage et adressage |
| couche transport | Transmission fiable de bout en bout |
| couche session | Synchroniser |
| couche de présentation | Encodage et représentation |
| couche application | Décrire comment configurer, transférer et synchroniser |
| Dispositif CANopen |
Bien que le bus CAN ait été utilisé avec succès dans de nombreuses industries, CANopen a été conçu pour permettre son utilisation dans un plus grand nombre de domaines. Conçu à l'origine pour les systèmes de commande de machines orientées vers le mouvement, CANopen est aujourd'hui utilisé dans différents domaines, tels que :
● Robotique
● Matériel médical
● Moteurs pas à pas et servomoteurs
● Transformation des aliments
● Automatisation
La structure interne du dispositif CANopen comporte trois parties logiques principales :
| Pile de protocoles | ● Manipulation de la communication via CAN n/w |
| Application | ● Soutenir la fonction de contrôle interne
● Fournir une interface pour le matériel |
| Dictionnaire d'objets | ● La configuration et le diagnostic des dispositifs CANopen sont les plus importants.
● Protocole d'interface et logiciel d'application ● Couvre tous les types de données d'utilisation ● Mémoriser tous les paramètres de communication et les paramètres d'application. |
Format de la trame de message CANopen : Le format de la trame de message de CANopen est similaire à celui du bus CAN. Il contient le COB-ID et les bits de contrôle, afin d'éviter tout conflit entre le COB-ID et le bus CAN.
Les COB-ID sont tous différents.

À la recherche d'un Coupleur PLC E/S? Cliquez pour en savoir plus !