3. convertisseur en service
3.1 Connexion à l'USB
Lorsque le pilote et le logiciel ont été installés, connectez le convertisseur à l'interface USB, un nouveau périphérique USBCAN nommé "GC - Tech USBCAN Device" peut être trouvé dans le gestionnaire de périphériques du PC.
3.2 Connexion au réseau CAN
Le convertisseur GCAN-206 se connecte au CAN-Bus comme au chapitre 2.3, CAN_H à CAN_H, CAN_L à CAN_L.
Le réseau de bus CAN adopte une structure topologique, seuls les deux terminaux les plus éloignés doivent être connectés à une résistance de 120Ω entre CAN_H et CAN_L. La longueur des branchements ne doit pas dépasser 3 mètres. La connexion des nœuds du bus CAN est illustrée à la figure 3.1.

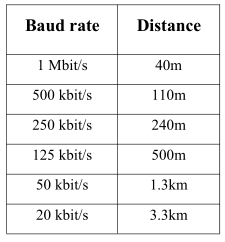
Remarque : le câble du bus CAN peut utiliser un câble à paires torsadées ordinaire ou un câble à paires torsadées blindé. La théorie de la distance maximale de communication dépend du débit en bauds du bus, leur relation est indiquée dans le tableau 3.1.
3.3 Résistance des bornes CAN-Bus
Afin d'améliorer la fiabilité de la communication et d'éliminer la réflexion des bornes du bus CAN, les deux bornes les plus éloignées doivent connecter une résistance terminale entre CAN_H et CAN_L, comme le montre la figure 3.2. Les valeurs de la résistance terminale sont déterminées par l'impédance caractéristique des câbles. Par exemple, l'impédance caractéristique est de 120Ω.
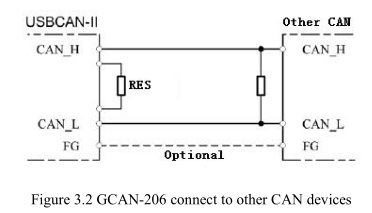
NOTE : Le GCAN-206 n'a pas de résistance terminale intégrée de 120Ω, et doit être ajouté par le client.
3.4 LED du système
Convertisseur GCAN-206 avec un indicateur SYS pour indiquer l'état du convertisseur. Un indicateur DAT pour indiquer la transmission des données. D'autres fonctions sont présentées dans les tableaux 3.2 et 3.3.

Lorsque le convertisseur GCAN-206 est mis sous tension, le voyant SYS s'allume, indiquant que le convertisseur est alimenté en électricité et que le système est initialisé. Dans le cas contraire, une coupure de courant ou des erreurs système se sont produites. Lorsque l'émetteur-récepteur de données CAN-Bus1 ou CAN-Bus2, DAT clignote.
