3. Adaptateur en cours d'utilisation
3.1 Temps du système de correction
Le GCAN-401 dispose d'une horloge système intégrée, d'une horloge système et d'un système de fichiers permettant d'enregistrer les données par date.
GCAN-401 crée chaque jour un dossier nommé par date. Les données des bus seront automatiquement déposées dans le dossier correspondant.
Le GCAN-401 crée un nouveau fichier par minute, les données sont enregistrées dans le fichier correspondant.
Si l'horloge système de l'adaptateur GCAN-401 n'est pas réelle avant l'utilisation, l'utilisateur peut ajuster sa propre heure en suivant les méthodes suivantes.
1. Utilisez un câble USB pour connecter le GCAN-401 et le PC (port USB dans la figure 3.2).
2. Utilisez l'assistant de débogage série pour envoyer votre temps à l'adaptateur.
(débit en bauds du port série : 115200, bits de données : 8, bit d'arrêt : 1, bit de parité Aucun, l'instruction est : "NT = XXX". Par exemple : envoyer "NT = 20170329215500", modifiera l'heure du système au 29 mars 2017 21:55:00. Veuillez noter qu'il faut envoyer et recevoir en ASCII et sélectionner "envoyer une nouvelle ligne", ne pas choisir "hex").
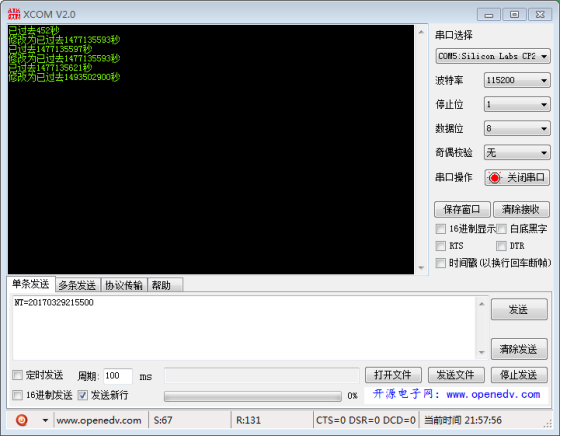
Figure 3.1 Interface temporelle du système de correction GCAN-401
3.2 Configuration du bus CAN
L'adaptateur GCAN-401 nécessite généralement que les utilisateurs règlent les paramètres de communication CAN-Bus en fonction de la demande réelle avant de l'utiliser.
3.2.1 Configuration de la vitesse de transmission du bus CAN
Le GCAN-401 peut prendre en charge certains taux de bauds couramment utilisés entre 10K~1000K. La vitesse de transmission peut être réglée par le commutateur de code, la position du commutateur de code étant indiquée dans la figure 3.2.

Figure 3.2 Profil du GCAN-401
Le commutateur de code "1, 2, 3, 4" peut régler le débit en bauds du CAN-Bus, et l'autre commutateur (5, 6, 8) a une définition spéciale, le côté par défaut vers le bas, s'il vous plaît ne pas régler arbitrairement. La valeur par défaut du commutateur de code est 0, chaque vitesse de transmission est indiquée dans le tableau 3.1.
Note : La modification du débit en bauds doit être mise hors tension.

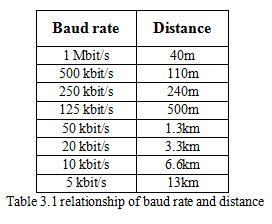
Tableau 3.1 Tableau de configuration de la vitesse de transmission du GCAN-401
3.2.2 Configuration de la résistance des bornes CAN-Bus
Le GCAN-401 a intégré une résistance terminale interne de 120Ω, les utilisateurs peuvent choisir d'accéder à l'appareil par l'intermédiaire d'un commutateur à code.
3.3 Connexion au réseau CAN
L'adaptateur CANCOM se connecte au bus CAN comme au chapitre 2.2, CAN_H à CAN_H, CAN_L à CAN_L.
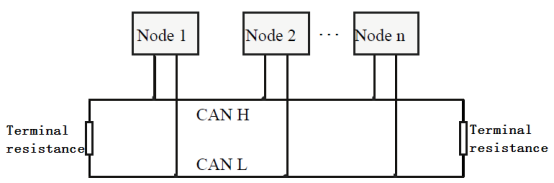
Le réseau CAN-bus adopte une structure topologique, seuls les deux terminaux les plus éloignés doivent être connectés à une résistance terminale de 120Ω entre CAN_H et CAN_L. La longueur des branchements ne doit pas dépasser 3 m. La connexion des nœuds CAN-bus est illustrée à la figure 3.1.
Remarque : le câble du bus CAN peut utiliser un câble à paires torsadées ordinaire ou un câble à paires torsadées blindé. La théorie de la distance maximale de communication dépend du débit en bauds du bus, leur relation est indiquée dans le tableau 3.1.
3.4 Résistance des bornes CAN-Bus
Afin d'améliorer la fiabilité de la communication et d'éliminer la réflexion des bornes du bus CAN, les deux bornes les plus éloignées doivent connecter une résistance terminale entre CAN_H et CAN_L, comme le montre la figure 3.2. Les valeurs de la résistance terminale sont déterminées par l'impédance caractéristique des câbles. Par exemple, l'impédance caractéristique est de 120Ω.
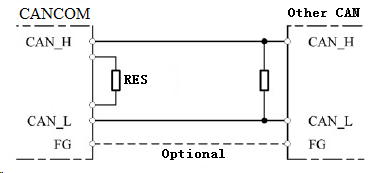
Note : L'adaptateur CANCOM n'intègre pas de résistance terminale de 120Ω, les utilisateurs doivent la connecter si nécessaire.
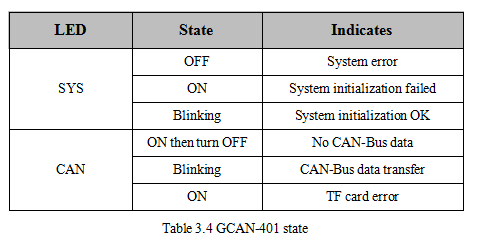
3.5 LED du système
Adaptateur GCAN-401 avec un indicateur SYS, un indicateur CAN pour indiquer l'état de l'adaptateur. D'autres fonctions sont présentées dans les tableaux 3.3 et 3.4.
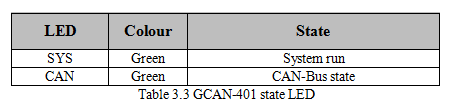
Lorsque l'adaptateur GCAN-401 est mis sous tension, la LED SYS clignote, ce qui indique que l'adaptateur est alimenté en électricité et que le système est initialisé ; dans le cas contraire, une panne de courant ou des erreurs système se sont produites.
Lors de la mise sous tension, l'allumage de la LED CAN indique une erreur de la carte TF.
Lorsque la LED CAN s'allume puis s'éteint, cela indique que la carte TF fonctionne correctement.
Lorsque l'adaptateur reçoit des données, la LED CAN clignote.